|
|
 发表于 2008-9-16 17:27:50
|
显示全部楼层
发表于 2008-9-16 17:27:50
|
显示全部楼层
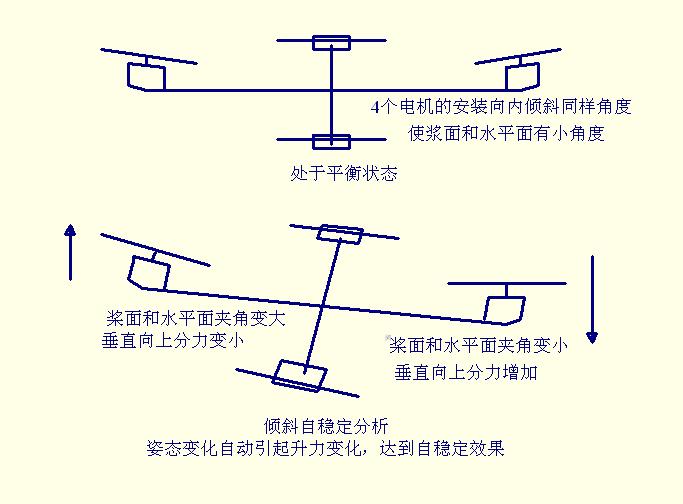
力挺楼主,那个玩具做比喻,喇叭口吹乒乓球的玩具大家都见过吧,气流恒定时乒乓球几乎稳定悬浮,当气流变化或侧向外力情况下乒乓球都能自我稳定,为什么呢
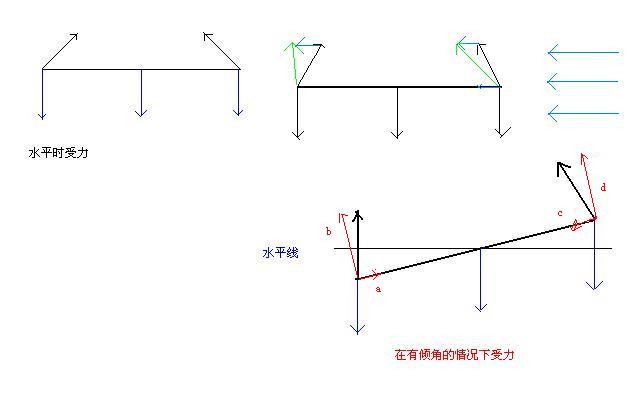
1纠正:当飞机受扰具有倾斜或俯仰时,四个桨的<升力方向和大小不改变>,那么相对于质心的力矩没有发生任何改变
"怎么可能不变呢,比如电扇你把他朝上吹、朝下吹,朝左吹,反作用力难道都是一样朝上吗
2纠正:陀螺产生的测速反馈带来的增稳效果,当然就是引入阻尼了,再加上遥控的输入近似于比例环节,就是pd控制了
我觉得不管是倾角也好,姿态检测后的pid控制也好,在这里都是一种力的负反馈(和电路的负反馈同理 请仔细看楼主的图片说明)当然这里也有反馈信号的相位延时(移相),当移相达到一定程度那就产生自激震荡.(你在程序中加段延时(不断修正延时时间看看效果!){而且大家可以很容易理解,pid控制应该是阶梯型的控制,而倾角控制是相对线性的,倾角调整几乎是实时的.不容易产生震荡>当然倾角调整最大的不足就是调整能力有限且和功的损耗成正比!,pid调整的优点刚好是倾角调整所办不到的
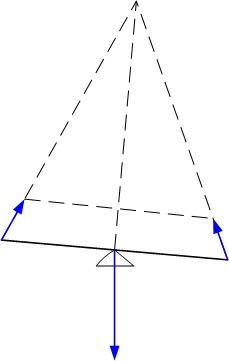
3纠正:刚体是按照质心计算力臂的。
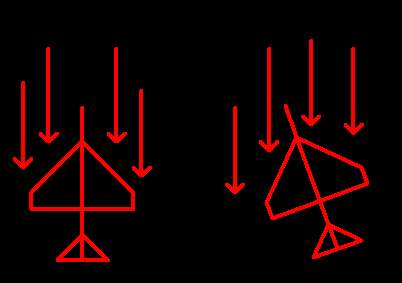
理想的物体才叫刚体,世上本没有你所所的支点.简化分析就是把一些参数理想化,电路里是这样,力学上也是如此,四轴简化分析那就是 <一个重力,始终向下,四个螺奖反作用力,朝螺旋桨的轴向,如果有风,那就是风吹的方向,其他的力是可以忽略的,.最重要的是螺旋桨反作用力,当要朝某一方向飞行,那就要有个力,飞机就要自己产生一个姿态,就是把螺旋桨的反作用力分化成一个向上的力和一个向前的推力,对抗风力实现悬停也是一样的道理
再解释23楼这个:但如果飞机速度很低或静止的(吊机)那么这样设计是没用的。情况将持续恶化直至栽下来。
飞机速度很低后,并不是说这个力不存在了,而是很弱了,效果不大了,飞机大多数情况下是高速飞行的(飞机失速很危险,低速飞行几乎都是特技.对飞机的技术要求操控要求都很高,为什么?).四轴悬停的时候是相对静止的,但是你不会否认,螺旋桨受力点的风速是很大的略小于螺旋桨的线速度(这是他产生升力的原因).所以四轴能悬停,飞机不行(飞机的升力是机翼迎风并改变风向产生的反作用力,就象螺旋桨的一个浆叶.
25楼完全没看懂楼主的用意,功的损耗是存在的没错,但这个倾角是有限的,且和你做的四轴性能有关,如果你的四轴驱动反应足够快,那完全不用做倾角,但是就如我前面说到的,你的控制回路肯定有延时,当你不能吧这个性能做到足够好的情况下,倾角就是一个有益的补充,如果这个倾角比较小比如1度,那这个损耗大家可以看的出几乎可以忽略不记,当然产生稳定的能力也很小,可见这个倾角的选择也是有许多学问的,这就是大家常听说的"机械调_教"机械调_教的重要性我想不用我说了吧
本贴被 chenminhua 编辑过,最后修改时间:2008-09-16,17:39:01. |
|


 楼主
楼主