|
|

楼主 |
发表于 2008-1-25 21:13:17
|
显示全部楼层
4个LED可以有节奏的点亮了
#include <avr/io.h>
#include <avr/Interrupt.h>
#include <avr/signal.h>
//LED引脚定义
#define LED_PORT PORTD
#define LED_MASK 0xF0
#define LED1 0x10
#define LED2 0x20
#define LED3 0x40
#define LED4 0x80
#define LED1On() LED_PORT |= LED1 // 点亮提示灯1
#define LED2On() LED_PORT |= LED2 // 点亮提示灯2
#define LED3On() LED_PORT |= LED3 // 点亮提示灯3
#define LED4On() LED_PORT |= LED4 // 点亮提示灯4
#define LED1Reverse() LED_PORT = LED_PORT ^ LED1 // 关闭提示灯1
#define LED2Reverse() LED_PORT = LED_PORT ^ LED2 // 关闭提示灯2
#define LED3Reverse() LED_PORT = LED_PORT ^ LED3 // 关闭提示灯3
#define LED4Reverse() LED_PORT = LED_PORT ^ LED4 // 关闭提示灯4
#define LEDOn() LED_PORT |= LED_MASK; // 所有灯点亮
#define LEDOff() LED_PORT &= (~LED_MASK)
unsigned char Stack[250];
register unsigned char OSRdyTbl asm("r2"); //任务运行就绪表
register unsigned char OSTaskRunningPrio asm("r3"); //正在运行的任务
#define OS_TASKS 4 //设定运行任务的数量
struct TaskCtrBlock //任务控制块
{
unsigned int OSTaskStackTop; //保存任务的堆栈顶
unsigned int OSWaitTick; //任务延时时钟
}TCB[OS_TASKS+1];
//防止被编译器占用
register unsigned char tempR4 asm("r4");
register unsigned char tempR5 asm("r5");
register unsigned char tempR6 asm("r6");
register unsigned char tempR7 asm("r7");
register unsigned char tempR8 asm("r8");
register unsigned char tempR9 asm("r9");
register unsigned char tempR10 asm("r10");
register unsigned char tempR11 asm("r11");
register unsigned char tempR12 asm("r12");
register unsigned char tempR13 asm("r13");
register unsigned char tempR14 asm("r14");
register unsigned char tempR15 asm("r15");
register unsigned char tempR16 asm("r16");
register unsigned char tempR16 asm("r17");
//建立任务
void OSTaskCreate(void (*Task)(void),unsigned char *Stack,unsigned char TaskID)
{
unsigned char i;
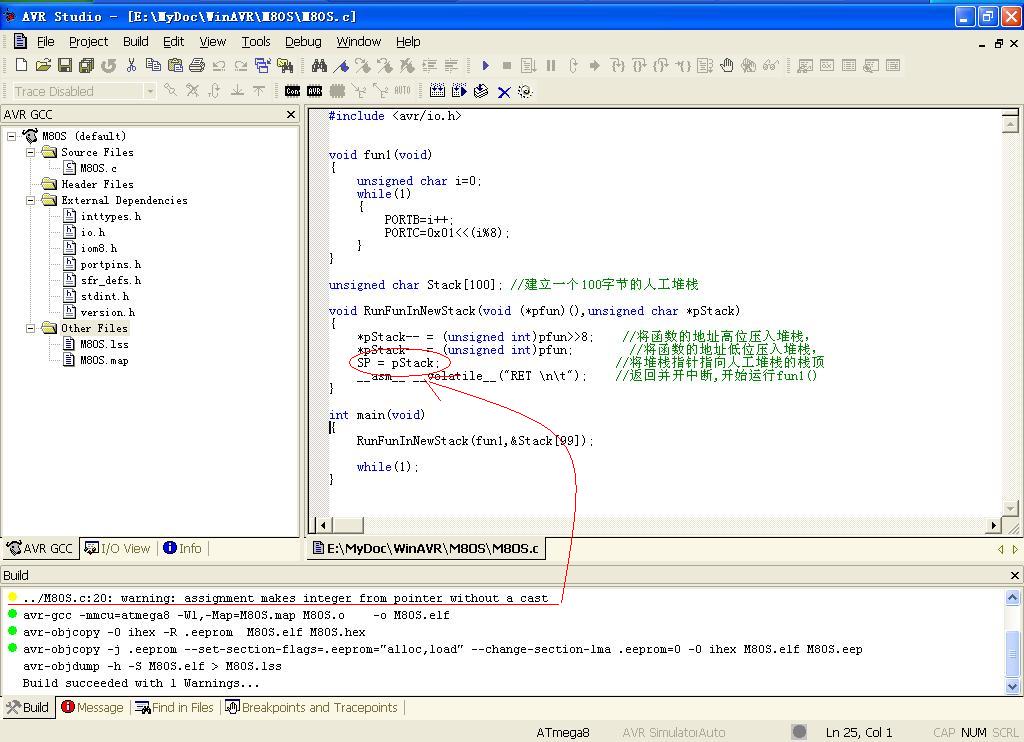
*Stack--=(unsigned int)Task; //将任务的地址低位压入堆栈,
*Stack--=(unsigned int)Task>>8; //将任务的地址高位压入堆栈,
//*Stack--=(unsigned int)Task; //将任务的地址低位压入堆栈,
*Stack-- = 0x00; //R1 __zero_reg__
*Stack-- = 0x00; //R0 __tmp_reg__
*Stack-- = 0x80; //SREG 在任务中,开启全局中断
for(i=0;i<14;i++) //在avr-libc中的FAQ中What registers are used by the C compiler?
*Stack-- = i; //描述了寄存器的作用
TCB[TaskID].OSTaskStackTop=(unsigned int)Stack;//将人工堆栈的栈顶,保存到堆栈的数组中
OSRdyTbl|= 0x01<<TaskID; //任务就绪表已经准备好
}
//开始任务调度,从最低优先级的任务的开始
void OSStartTask()
{
OSTaskRunningPrio = OS_TASKS;
SP = TCB[OS_TASKS].OSTaskStackTop+17;
__asm__ __volatile__("reti \n\t");
}
//进行任务调度
void OSSched(void)
{
// 根据中断时保存寄存器的次序入栈,模拟一次中断后,入栈的情况
__asm__ __volatile__("PUSH __zero_reg__ \n\t"); //R1
__asm__ __volatile__("PUSH __tmp_reg__ \n\t"); //R0
__asm__ __volatile__("IN __tmp_reg__, __SREG__ \n\t"); //保存状态寄存器SREG
__asm__ __volatile__("PUSH __tmp_reg__ \n\t");
__asm__ __volatile__("CLR __zero_reg__ \n\t"); //R0重新清零
__asm__ __volatile__("PUSH R18 \n\t");
__asm__ __volatile__("PUSH R19 \n\t");
__asm__ __volatile__("PUSH R20 \n\t");
__asm__ __volatile__("PUSH R21 \n\t");
__asm__ __volatile__("PUSH R22 \n\t");
__asm__ __volatile__("PUSH R23 \n\t");
__asm__ __volatile__("PUSH R24 \n\t");
__asm__ __volatile__("PUSH R25 \n\t");
__asm__ __volatile__("PUSH R26 \n\t");
__asm__ __volatile__("PUSH R27 \n\t");
__asm__ __volatile__("PUSH R30 \n\t");
__asm__ __volatile__("PUSH R31 \n\t");
__asm__ __volatile__("PUSH R28 \n\t"); //R28与R29用于建立在堆栈上的指针
__asm__ __volatile__("PUSH R29 \n\t"); //入栈完成
TCB[OSTaskRunningPrio].OSTaskStackTop = SP; //将正在运行的任务的堆栈底保存
unsigned char OSNextTaskID; //在现有堆栈上开设新的空间进行任务调度
for(OSNextTaskID = 0;OSNextTaskID < OS_TASKS && !(OSRdyTbl & (0x01<<OSNextTaskID));OSNextTaskID++);
OSTaskRunningPrio = OSNextTaskID;
cli(); //保护堆栈转换
SP = TCB[OSTaskRunningPrio].OSTaskStackTop;
sei();
//根据中断时的出栈次序
__asm__ __volatile__("POP R29 \n\t");
__asm__ __volatile__("POP R28 \n\t");
__asm__ __volatile__("POP R31 \n\t");
__asm__ __volatile__("POP R30 \n\t");
__asm__ __volatile__("POP R27 \n\t");
__asm__ __volatile__("POP R26 \n\t");
__asm__ __volatile__("POP R25 \n\t");
__asm__ __volatile__("POP R24 \n\t");
__asm__ __volatile__("POP R23 \n\t");
__asm__ __volatile__("POP R22 \n\t");
__asm__ __volatile__("POP R21 \n\t");
__asm__ __volatile__("POP R20 \n\t");
__asm__ __volatile__("POP R19 \n\t");
__asm__ __volatile__("POP R18 \n\t");
__asm__ __volatile__("POP __tmp_reg__ \n\t"); //SERG 出栈并恢复
__asm__ __volatile__("OUT __SREG__, __tmp_reg__ \n\t"); //
__asm__ __volatile__("POP __tmp_reg__ \n\t"); //R0 出栈
__asm__ __volatile__("POP __zero_reg__ \n\t"); //R1 出栈
//中断时出栈完成
}
void OSTimeDly(unsigned int ticks)
{
if(ticks) //当延时有效
{
OSRdyTbl &= ~(0x01<<OSTaskRunningPrio);
TCB[OSTaskRunningPrio].OSWaitTick = ticks;
OSSched(); //从新调度
}
}
void TCN0Init(void) // 计时器0
{
TCCR0 = 0;
TCCR0 |= (1<<CS02); // 256预分频
TIMSK |= (1<<TOIE0); // T0溢出中断允许
TCNT0 = 100; // 置计数起始值
}
SIGNAL(SIG_OVERFLOW0)
{
unsigned char i;
for(i=0;i<OS_TASKS;i++) //任务时钟
{
if(TCB.OSWaitTick)
{
TCB.OSWaitTick--;
if(TCB.OSWaitTick==0) //当任务时钟到时,必须是由定时器减时的才行
{
OSRdyTbl |= (0x01<<i); //使任务在就绪表中置位
}
}
}
TCNT0=100;
}
void Task0()
{
while(1)
{
LED1On();
OSTimeDly(10);
LED1Reverse();
OSTimeDly(10);
}
}
void Task1()
{
while(1)
{
LED2On();
OSTimeDly(20);
LED2Reverse();
OSTimeDly(20);
}
}
void Task2()
{
while(1)
{
LED3On();
OSTimeDly(40);
LED3Reverse();
OSTimeDly(40);
}
}
void Task3()
{
while(1)
{
LED4On();
OSTimeDly(80);
LED4Reverse();
OSTimeDly(80);
}
}
void TaskScheduler()
{
while(1)
{
OSSched(); //反复进行调度
}
}
int main(void)
{
DDRD = 0xff;
LEDOn();
TCN0Init();
OSRdyTbl = 0;
OSTaskRunningPrio = 0;
OSTaskCreate(Task0, &Stack[49], 0);
OSTaskCreate(Task1, &Stack[99], 1);
OSTaskCreate(Task2, &Stack[149], 2);
OSTaskCreate(Task3, &Stack[199], 3);
OSTaskCreate(TaskScheduler, &Stack[249], OS_TASKS);
OSStartTask();
LEDOff();
return 0;
} |
|


 发表于 2008-1-25 19:48:56
发表于 2008-1-25 19:48:56