|
|
MCU (原文件名:照片-0023.jpg)
洞洞板 (原文件名:照片-0024.jpg)
NMOS管,传感器板 (原文件名:照片-0025.jpg)

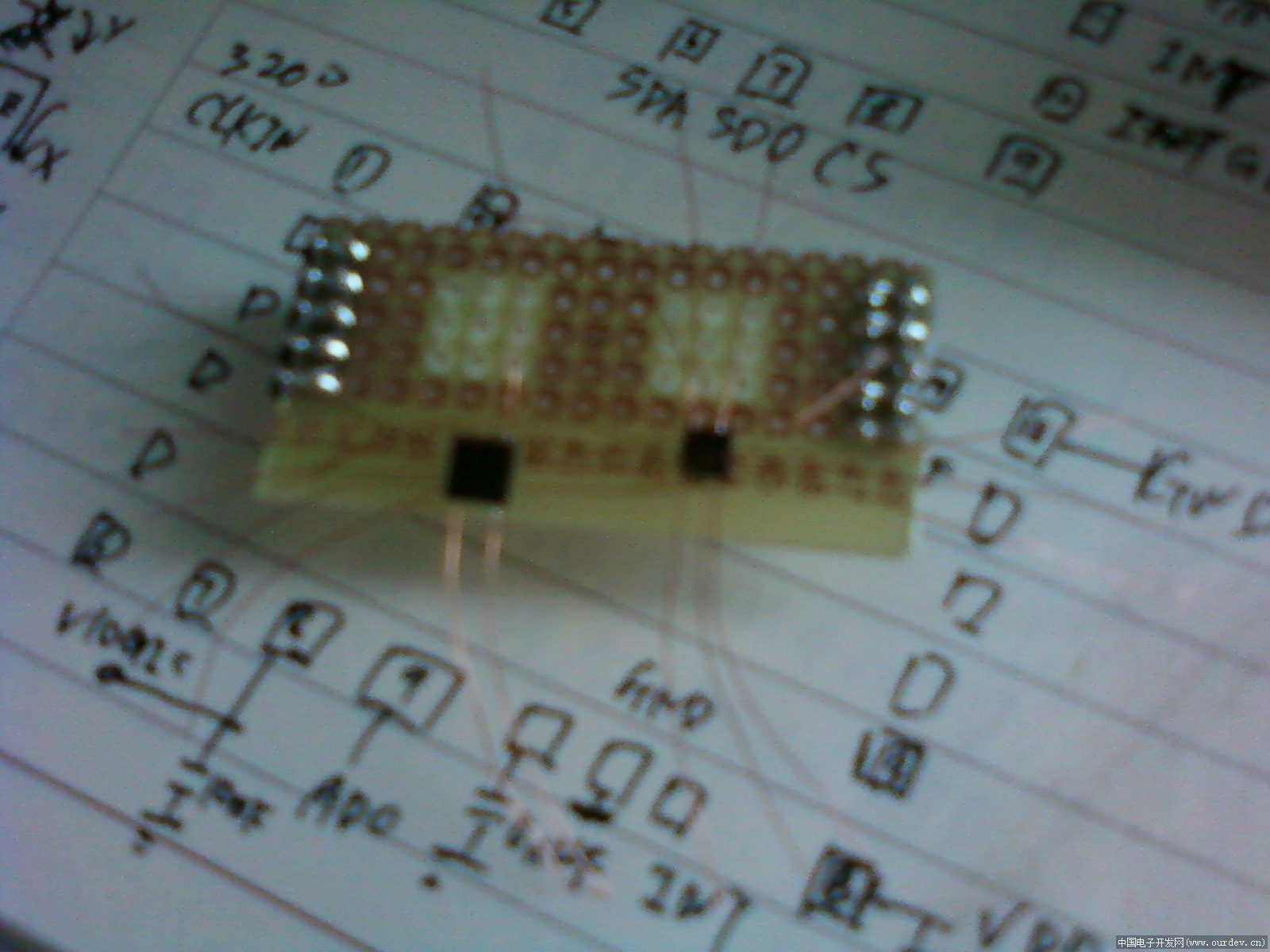
引出线之后的3轴陀螺仪 (原文件名:照片-0026.jpg)

焊盘 (原文件名:照片-0027.jpg)

焊盘2 (原文件名:照片-0028.jpg)
引出线之后的陀螺仪和加速度计 (原文件名:照片-0029.jpg)
把线连到附近的洞洞板焊盘上 (原文件名:照片-0030.jpg)

把线连到附近的洞洞板焊盘上 (原文件名:照片-0031.jpg)
连线 (原文件名:照片-0032.jpg)

做好之后 (原文件名:照片-0033.jpg)
背面的一些元器件 (原文件名:照片-0034.jpg)

焊好的板子 (原文件名:照片-0035.jpg)
板子背面 (原文件名:照片-0036.jpg)
代码是在 "原创源码公开:基于KK飞控的一个纯C的四轴飞控完整代码 gale "
http://www.ourdev.cn/bbs/bbs_content.jsp?bbs_sn=4706890&bbs_page_no=1&search_mode=4&search_text=autopass&bbs_id=9999
基础上改的,
现在还只能用到陀螺仪,也算勉强能飞起来了,关于加速度对陀螺仪的修正还不知道怎么去弄,暂时的想法比较简单,就是求加速度的多次平均,算出角度,然后和陀螺仪积分角度比较,再慢慢地让陀螺仪积分角度逼近通过加速度算出的角度,下面是通过加速度算出的角度和陀螺仪积分角度的曲线对比,角度是64次加速度平均算出来的,角度值是放大100倍之后的,CH1/CH2是加速度得出的角度,CH3/CH4是陀螺仪的积分角度,积分间隔为10毫秒.
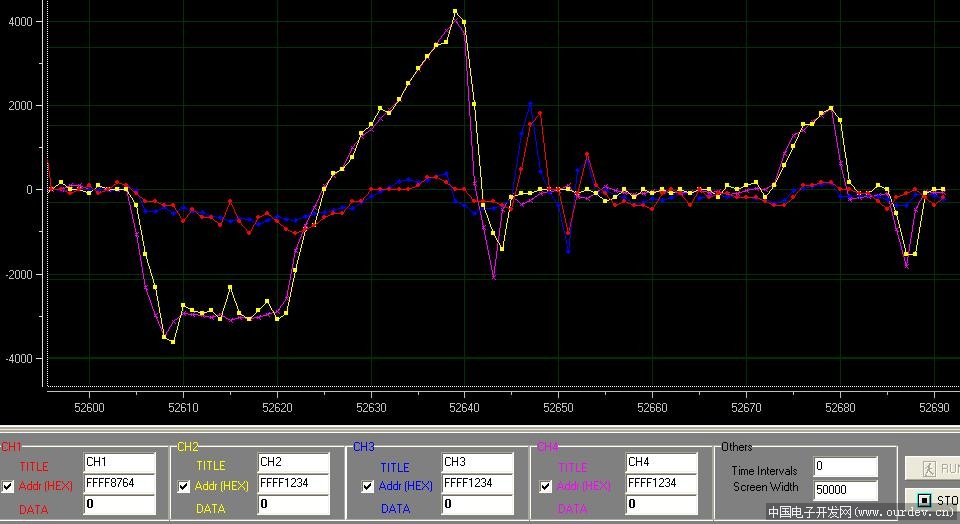
(原文件名:曲线.jpg) |
阿莫论坛20周年了!感谢大家的支持与爱护!!
知道什么是神吗?其实神本来也是人,只不过神做了人做不到的事情 所以才成了神。 (头文字D, 杜汶泽)
|


 发表于 2011-8-2 12:09:17
发表于 2011-8-2 12:09:17
 楼主
楼主
