|
|
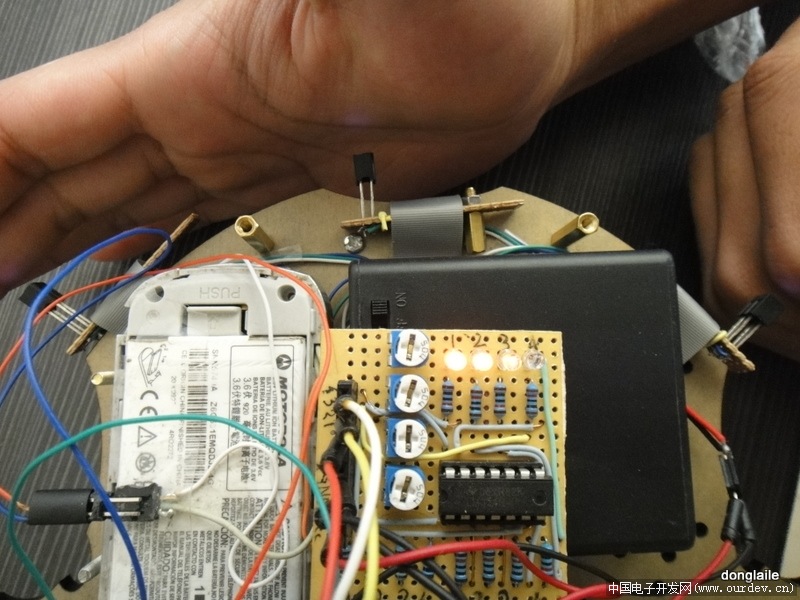
潜水很久了,在论坛上学了很多。发个以前做的小车,那时的我只知道单片机很强大,不知道怎么用,总觉得学电子要花好多钱,在读书又没多少钱,虽然学的是电子专业,但那时才大一,也没人指导,也不知道去找老师请教,自己学习加网上找资料还是花了近一年的时间才弄出来的。
》》》现在看看觉得当时太笨了
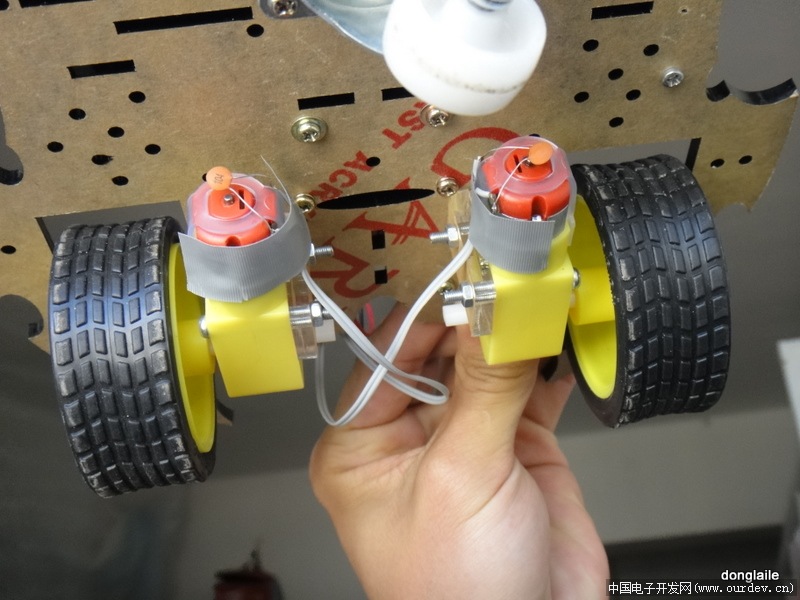
减速电机 (原文件名:DSC00073.JPG)

(原文件名:DSC00064.JPG)

(原文件名:DSC00072.JPG)
(原文件名:DSC00071.JPG)

(原文件名:DSC00056.JPG)

(原文件名:DSC00054.JPG)
(原文件名:DSC00058.JPG)
(原文件名:DSC00057.JPG)

(原文件名:DSC00053-1.JPG)
(原文件名:DSC00067.JPG)
(原文件名:DSC00069.JPG)
(原文件名:DSC00065.JPG)
程序:
int inputPin=12;
int outputPin=13;
int pinI1=8;//定义I1接口
int pinI2=9;//定义I2接口
int speedpin0=5;//定义EA(PWM调速)接口
int pinI3=10;//定义I3接口
int pinI4=11;//定义I4接口
int speedpin1=6;//定义EB(PWM调速)接口
int IRR=2;//定义右侧避障传感器接口
int IRM=3;//定义中间避障传感器接口
int IRL=4;//定义左侧避障传感器接口
void setup()
{
Serial.begin(9600);
pinMode(pinI1,OUTPUT);
pinMode(pinI2,OUTPUT);
pinMode(speedpin0,OUTPUT);
pinMode(pinI3,OUTPUT);
pinMode(pinI4,OUTPUT);
pinMode(speedpin1,OUTPUT);
pinMode(IRR,INPUT);
pinMode(IRM,INPUT);
pinMode(IRL,INPUT);
pinMode(inputPin,INPUT);
pinMode(outputPin,OUTPUT);
}
void loop()
{
int r,m,l;
/***********************读取红外接收管信号**************************/
r=digitalRead(IRR);
m=digitalRead(IRM);
l=digitalRead(IRL);
/******************超声波测距*************************/
digitalWrite(outputPin,LOW);
delayMicroseconds(2);
digitalWrite(outputPin,HIGH);
delayMicroseconds(10);
digitalWrite(inputPin,LOW);
long distance=pulseIn(inputPin,HIGH);
distance=distance/58;
Serial.print("S=");
Serial.print(distance);
Serial.print("cm");
Serial.println();
/*******************************************/
if(distance>10)//双分支
{
advance(120);//前进
}
else
{
if(l==HIGH &&m==HIGH && r==HIGH)//分别装在三个方向上,低电平有效
advance(120);//前进
if(l==LOW &&m==LOW && r==LOW )
{
back(120);//后退
delay(300);
right(100);//右转
delay(100);
}
if(l==LOW &&m==HIGH && r==LOW )
{
back(120);//后退
delay(300);
right(100);//右转
delay(100);
}
if(l==HIGH &&m==LOW && r==HIGH )
{
back(120);//后退
delay(300);
right(100);//右转
delay(100);
}
if(l==LOW &&m==LOW && r==HIGH )
right(100);//右转
if(l==LOW && m==HIGH && r==HIGH)
right(80);//右转
if(l==HIGH &&m==LOW && r==LOW )
left(100);//左转
if(l==HIGH &&m==HIGH && r==LOW )
left(80);//左转
}
}
void advance(int a)//前进
{
analogWrite(speedpin0,a);//输入模拟值进行设定速度
analogWrite(speedpin1,a);
digitalWrite(pinI4,LOW);//使直流电机(右)逆时针转
digitalWrite(pinI3,HIGH);
digitalWrite(pinI1,LOW);//使直流电机(左)顺时针转
digitalWrite(pinI2,HIGH);
}
void right(int r)//右转
{
analogWrite(speedpin0,r);//输入模拟值进行设定速度
analogWrite(speedpin1,r);
digitalWrite(pinI4,HIGH);//使直流电机(右)顺时针转
digitalWrite(pinI3,LOW);
digitalWrite(pinI1,LOW);//使直流电机(左)顺时针转
digitalWrite(pinI2,HIGH);
}
void left(int l)//左转
{
analogWrite(speedpin0,l);//输入模拟值进行设定速度
analogWrite(speedpin1,l);
digitalWrite(pinI4,LOW);//使直流电机(右)逆时针转
digitalWrite(pinI3,HIGH);
digitalWrite(pinI1,HIGH);//使直流电机(左)逆时针转
digitalWrite(pinI2,LOW);
}
void Stop()//停止
{
digitalWrite(pinI4,HIGH);//使直流电机(右)制动
digitalWrite(pinI3,HIGH);
digitalWrite(pinI1,HIGH);//使直流电机(左)制动
digitalWrite(pinI2,HIGH);
}
void back(int b)//后退
{
analogWrite(speedpin0,b);//输入模拟值进行设定速度
analogWrite(speedpin1,b);
digitalWrite(pinI4,HIGH);//使直流电机(右)顺时针转
digitalWrite(pinI3,LOW);
digitalWrite(pinI1,HIGH);//使直流电机(左)逆时针转
digitalWrite(pinI2,LOW);
}
速度值要自己实际调试,我用的是两个坏手机的电池串联供电的,速度跟电压有关
pde格式的文件ourdev_662334N97PWC.zip(文件大小:1K) (原文件名:xunji_first.zip)
哦,还有红外蔽障电路
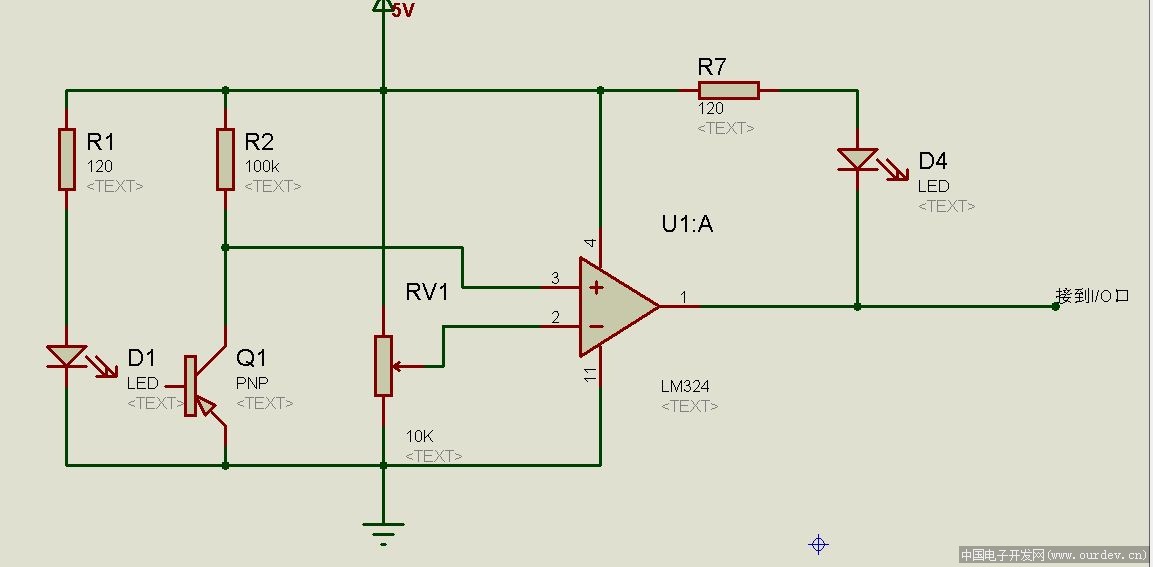
(原文件名:捕获.JPG)
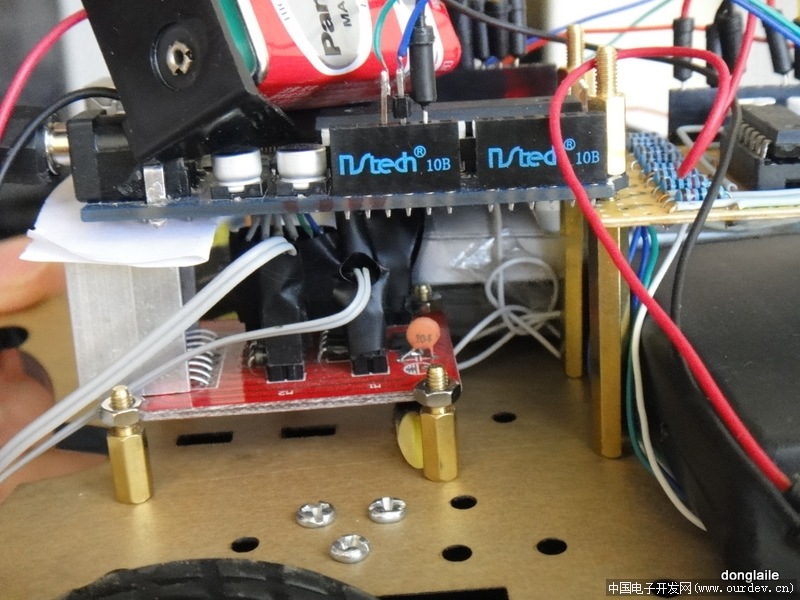
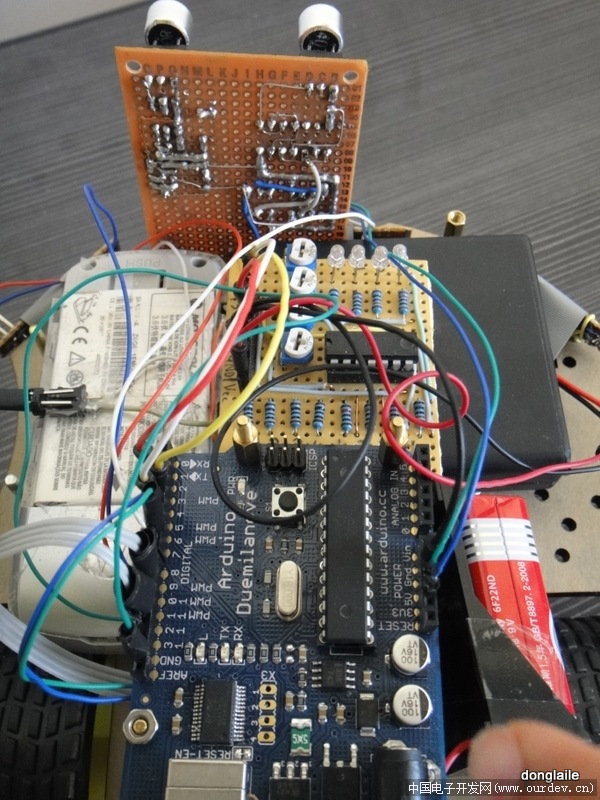
其他的都用了超声波模块和电机驱动模块 |
阿莫论坛20周年了!感谢大家的支持与爱护!!
曾经有一段真挚的爱情摆在我的面前,我没有珍惜,现在想起来,还好我没有珍惜……
|


 发表于 2011-7-30 20:50:46
发表于 2011-7-30 20:50:46
 楼主
楼主