|
|

楼主 |
发表于 2011-5-22 07:31:46
|
显示全部楼层
回复【28楼】arokh 圆圆的饭团
lz我觉得你误入歧途了。人腿的结构适合人脑这种神经网络模糊算法控制。既然是计算机控制,不如学习一下simulink建模。
-----------------------------------------------------------------------
对我而言,没有"歧途",也没有"正道".兴趣而已. 学习"犯罪心理学",不一定就打算当犯人.
先生有建模的能耐,就帮老头算一下,做个善事:
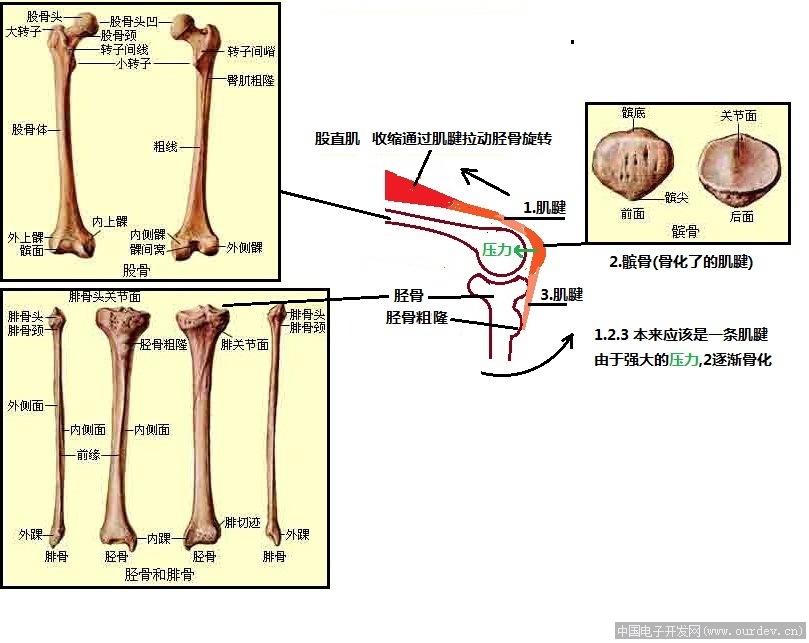
设体重150斤,楼梯台阶高180mm,建立股直肌的拉力F的函数.
回复【29楼】cock
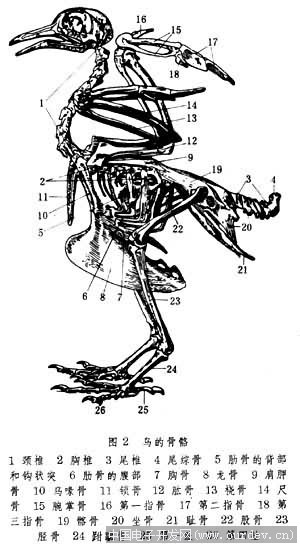
真的模仿人关节,就做样机就能破产,还是考虑轮式吧,没有一种动物有这种结构。
-----------------------------------------------------------------------
基本同意.去年为了参观世博会,花了800元买了辆铝合金轮椅,仅用了一次.自己也考虑过如何改装成电动的,后来不了了之.
因为我住在四楼,估计搬上搬下就受不了.
我想,其实,轮式并不一定是唯一的高效的行走方法.上帝造人时,还没有水泥路,如果有的话,人腿就应该像"风火轮"了.
我的大腿里的血管已经闭塞,走路极不方便了. 所以,也想找到一种高效的行走方法.
去年前,我每次走路最多不会超过200米,今年来,通过自己摸索"走路方法"(放松不该紧张的腿部肌肉,合适的上体前倾角度),
目前已经能达到1000多米了.
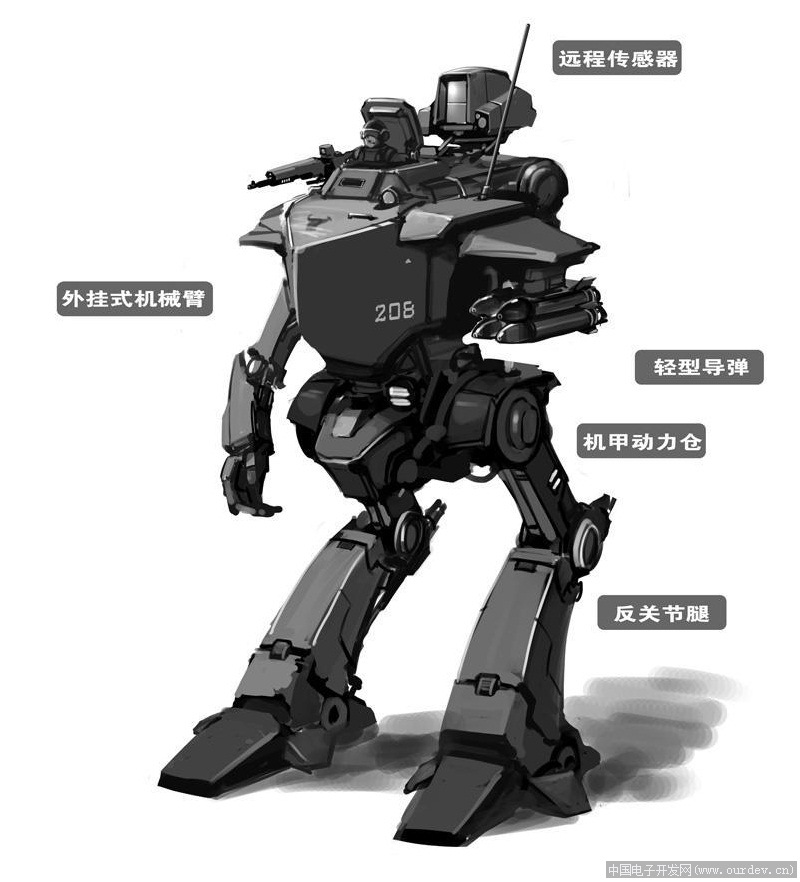
应该说我对"行走机器人"比较感兴趣. 而"全身肌肉紧张"的"舞蹈机器人"对我老头来说,就"不屑一顾"了. |
|


 发表于 2011-5-20 13:05:48
发表于 2011-5-20 13:05:48