|
|
 发表于 2011-6-22 23:18:15
|
显示全部楼层
发表于 2011-6-22 23:18:15
|
显示全部楼层
回复【8楼】swindhust
回复【5楼】qwernet 小俊
-----------------------------------------------------------------------
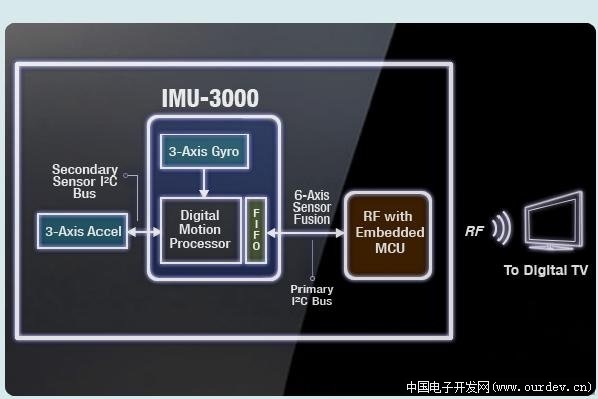
你好,我目前的一个方案也是mpu3050+akm8975+kxsd9,比较疑惑,请教几个问题, 硬件连接上akm8975和kxsd9都是连在mpu3050的secondary i2c bus上吗? 还有orientation数据是mpu提供的mpl模块里计算出来的? 在framework层里的处理大概有什么变化?因为时间比较短,想先确定这个方案的性能。
谢谢了!
-----------------------------------------------------------------------
我的做法是kxtf9接在mpu3050的i2c上,akm8975c接在CPU的i2c。
orientation是自己根据IC安装方向来定的,其实就是读到的数据乘以这个矩阵得到实际返回的数据。如果跟datasheet上安装方向相同,那么就是1,0,0,0,1,0,0,0,1。 |
|