|
|
多旋翼直升机(四轴飞行器)之开源整合平台
六、电路模组应用单元
主题一:全数位式双向收发遥控器
主题二:飞行姿态分析仪
==============================================================================================
主题三:无刷直流马达以及电子调速器
==============================================================================================
程式测试一:
1.主旨:修改商制电调(PWM),成为四轴TWI(I2C)形式的电调,再外加转速锁定。
2.目的:
a. 使用TWI(I2C)通讯, 传递数字化数值。
b. 电调本身使用类似PID的方式锁定转速,在M8/12Mhz下,只能处理5000RPM以下的锁速。
c. 配合飞控模块上的飞控程式, 用定速参数沟通,所需要锁定的转速。
d. 能传回转速值及PWM参数值给飞控程式。
e. 调速占空比不使用M8中的PWM功能,改由直接控制I/O脚的ON/OFF。
f. 开环启动是参考MK的程式。
g. 锁转速的目的,是为了能让飞控程式依转速与拉力的对应表,使遥控推杆的行程能和拉力成线性的比例式关系。以便达成好的操作手感。
3.模块对应的程式清单:
a. 电调模块测试程式 点击此处下载 ourdev_625671M6AXWF.zip(文件大小:9K) (原文件名:BLMC_10_TWI.zip)
b. 电调模块原理图(PDF档) (Eagle档)点击此处下载 ourdev_625672YHQCAR.zip(文件大小:56K) (原文件名:BLMC.zip)
c.飞控模块测试程式 点击此处下载 ourdev_625689OK45AU.zip(文件大小:8K) (原文件名:FLIGHT_CONTROL_01.zip)
4.心得:
a. 目前程式只能配合10x45螺旋桨, 以及这一颗DIY马达,不保证其他组合可行。
b. 在M8/12Mhz下,只能处理5000RPM以下的锁速。
c. 锁转速是达成理想操作手感的關鍵。
5.备注:
a.尚无过电流保护程式与电路。
b.要建立定速参数与拉力的对应表,做为摇杆行程对应拉力的参考。
c.接下来可以进到飞控程式部份了!离起飞的日子不远了!
无刷马达电调模组照片(由商制电调改装而成)

(原文件名:BLMC_01.JPG)
无刷马达电调模组照片(原商制电调)

(原文件名:BLMC_00.JPG)
无刷马达电调模组照片(P-Channel TPC8103 + N-Channel FDS 7644A)
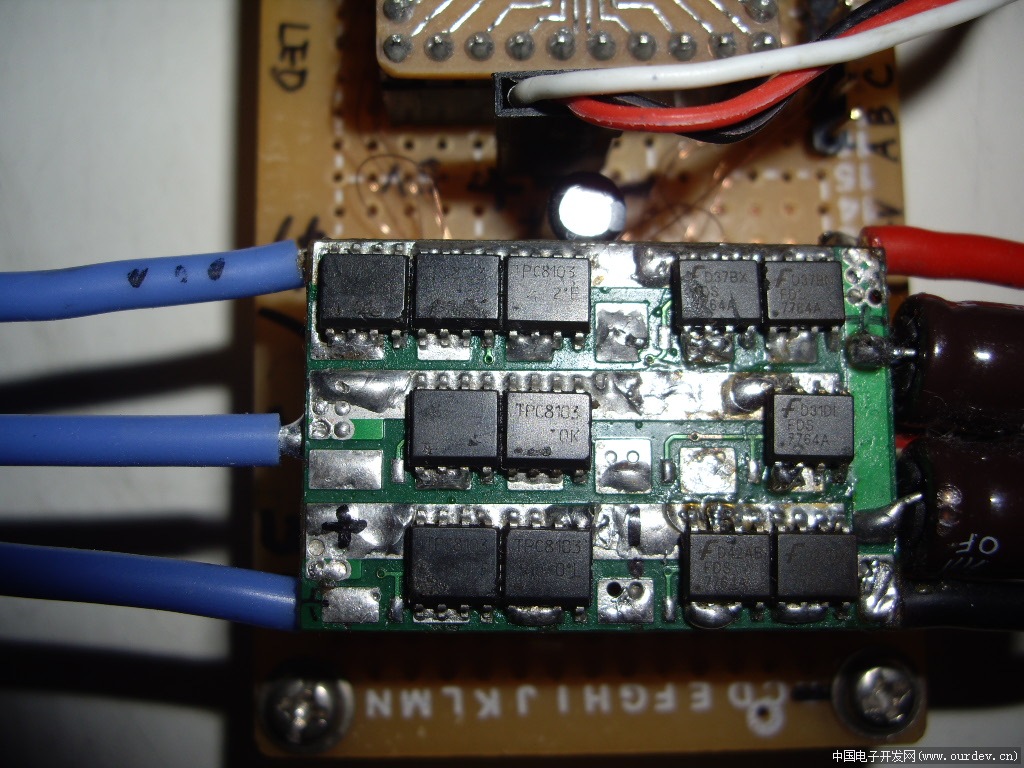
(原文件名:BLMC_02.JPG)
无刷马达电调模组照片(用漆包线重焊接脚电路)
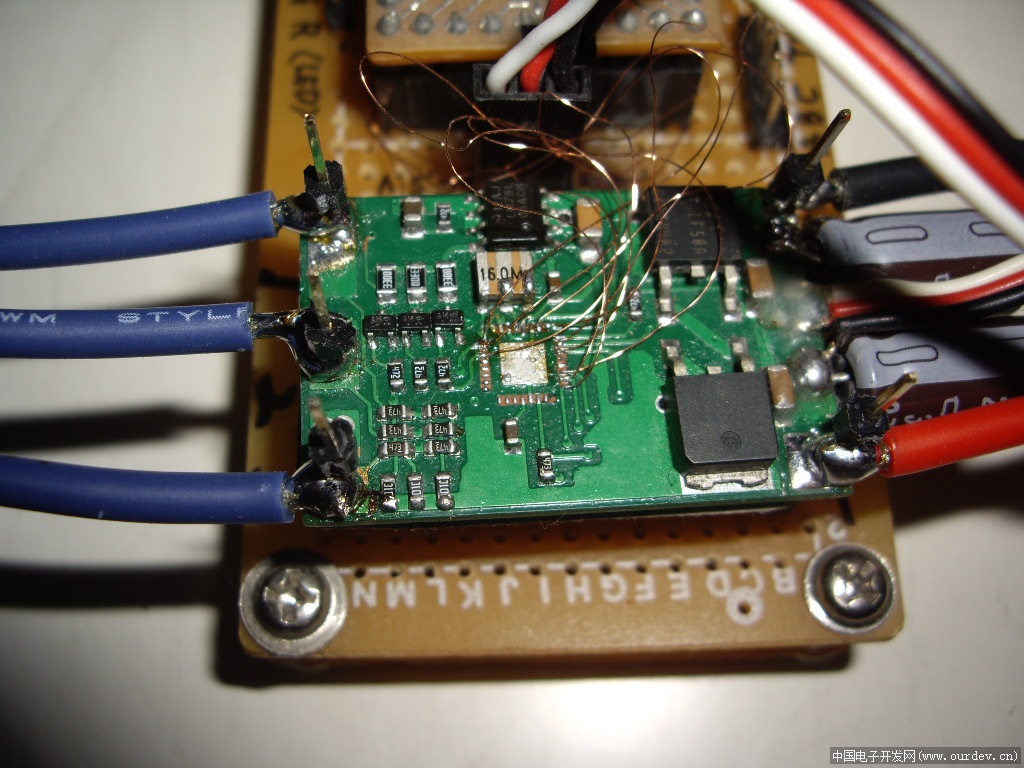
(原文件名:BLMC_03.JPG)
无刷马达照片(10x45螺旋桨+ DIY 马达组)

(原文件名:BLDC_MOTOR_01.JPG)
无刷马达照片 (DIY 马达组) 磁石以NSNSNS...的方法排列,是重视扭力及降转速的排法,有利于推大桨。
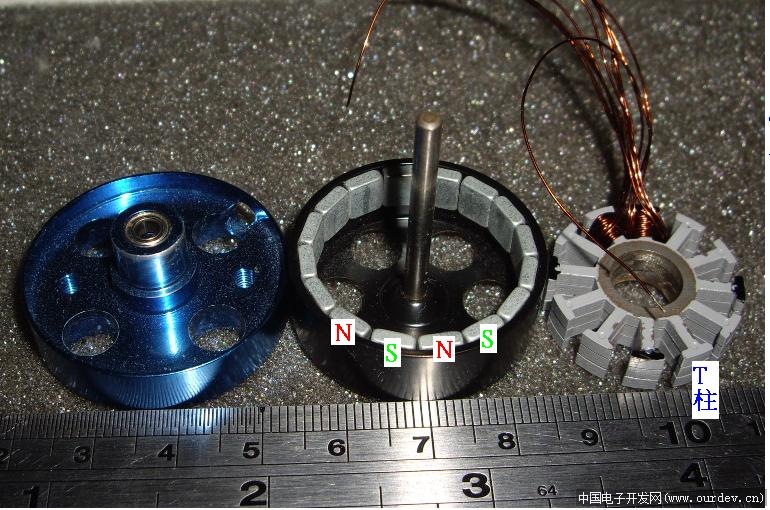
(原文件名:BLDC_MOTOR_02.JPG)
(用0.3mm漆包線,同時2條線,每T柱繞15圈) 重视扭力的绕线法,有利于推大桨。
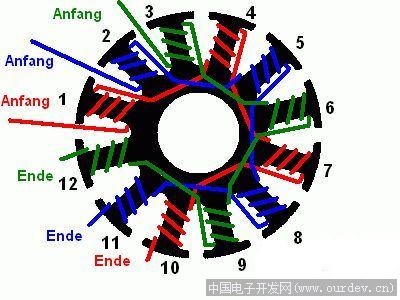
(原文件名:BLDC_MOTOR_03.JPG)
螺旋桨拉力测试机架
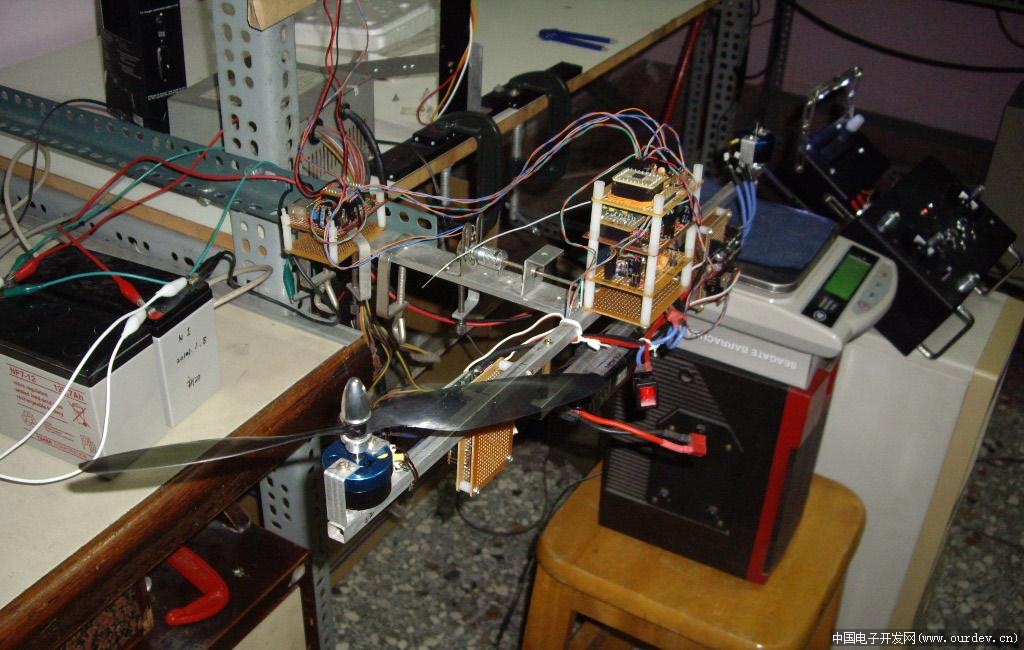
(原文件名:BLMC_04.JPG)
测试机架
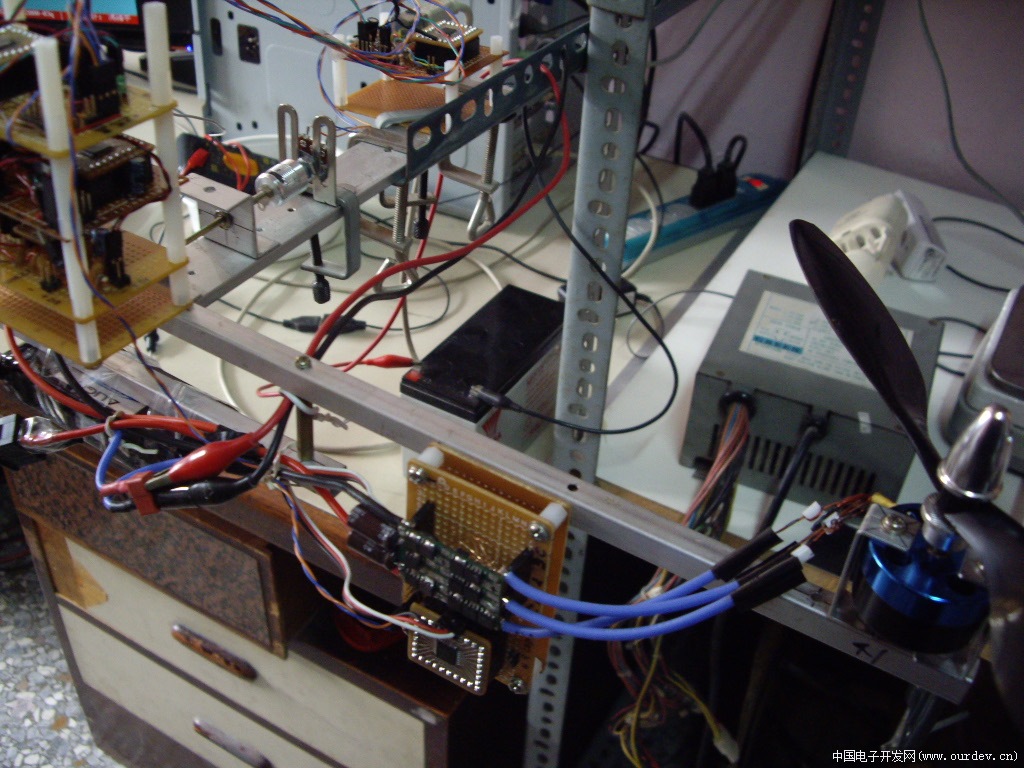
(原文件名:BLMC_05.JPG)
补充内容 (2012-3-28 14:49):
12楼:更正电调原理图资料。 |
阿莫论坛20周年了!感谢大家的支持与爱护!!
你熬了10碗粥,别人一桶水倒进去,淘走90碗,剩下10碗给你,你看似没亏,其实你那10碗已经没有之前的裹腹了,人家的一桶水换90碗,继续卖。说白了,通货膨胀就是,你的钱是挣来的,他的钱是印来的,掺和在一起,你的钱就贬值了。
|


 发表于 2011-3-26 19:15:41
发表于 2011-3-26 19:15:41
 楼主
楼主