|
|
 发表于 2010-12-18 21:59:59
|
显示全部楼层
发表于 2010-12-18 21:59:59
|
显示全部楼层
陀螺仪只是一个相对器件,要想得到姿态,就必须知道初值然后积分,所以,即使角速度极其微小的漂移,积分之后也会变得很大,越来越大,直到发散,要想得到长期无偏的全姿态,必须有作为参考的绝对器件(相对于地球的绝对),加速度计就是其中之一,可以得到体坐标系Z轴(加速度计平放)与重力向量的夹角(注意,这不是欧拉角,因此由arctan(Ax/(Ay^2+Az^2))等等那几个计算出来的角度只能描述xy平面的倾斜程度 ),而且偏航角也无法知道,因此要得到全姿态,必须再加上一个对偏航角敏感的绝对器件,一般是磁阻传感器.
这样,由三轴加速度计和三轴磁阻传感器的测量值可以确定一个姿态(真正的全姿态),但是由于振动,磁干扰等等噪声,使得这个姿态噪声较大,但是有个特点,无论如何它不会漂移出一定的范围,因此,由这个姿态作为参考,然后结合相对器件陀螺仪的优良动态性能,保证动态姿态估计的稳定,这样就结合了相对器件的短时动态性能和绝对器件的长期稳定性能
至于姿态的数学计算平台,有欧拉姿态角和姿态四元数,它们都是描述的体坐标系和参考坐标系的角位置关系,只不过欧拉角是三次旋转,而四元数是一次旋转,欧拉角的第二次旋转接近90度时,微分方程会发生退化,此时第一次和第三次旋转意义相同,也就是常说的"万向锁"
而且对于同一个姿态,存在多种三次旋转,而四元数则以一种十分简洁明了的方式描述角位置关系 --- 一次旋转,就像由复数描述二维旋转一样,四元数将三维旋转变得同样简洁优美,但是无论是欧拉角还是四元数,在做坐标变换的时候都会引入姿态矩阵来方便机器计算
而对于相对器件和绝对器件的融合问题则通过各种融合算法来解决,可能在论坛上看得到最多的是"卡尔曼滤波",但是我个人认为无论是从易行性和计算量来看,卡尔曼滤波要想实现的比较理想,是蛮难的,而普通的互补滤波则显得更容易接受一些,仅仅计算出偏差然后以一定的时间常数校正就行了
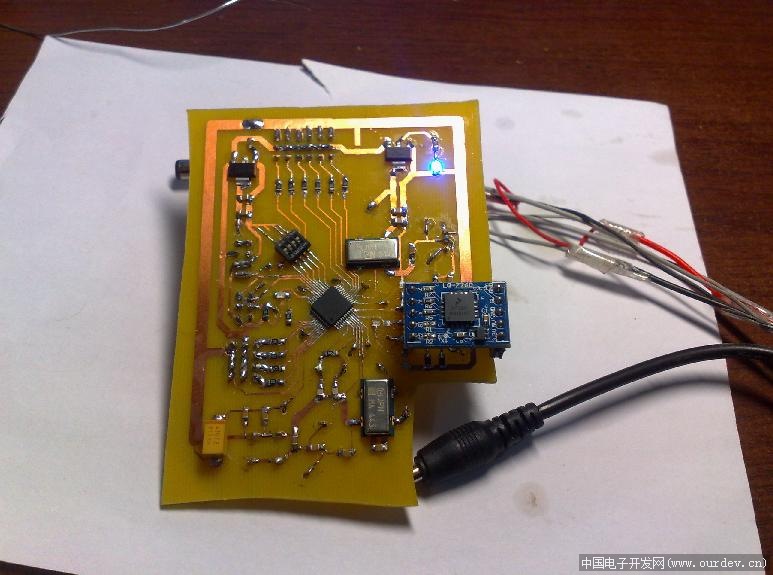
看了看你的板子,两个x,y轴陀螺,一个三轴加速度计,还有一个黑的不知道是什么东西(长的像拨码开关),是无法得到全姿态了,不过可以得到机体xy平面的倾斜程度,如果仅仅需要飞控作为遥控的辅助稳定是够了
虽然我自己也是个半吊子水货,深深的陷入全姿态泥潭,但我希望我们可以努力研究全姿态估计,而不仅仅是为了组装组装MK |
|


 楼主
楼主