|
|
四轴飞行的资料在论坛中有很多,包括几位大虾们的杰作,但是关于四轴飞行的入门级(科普级)的知识不多见。维基百科(http://en.wikipedia.org/wiki/Quadrotor)和MikroKopter(http://www.mikrokopter.com/ucwiki/en/Mikrokopter-Get-started)上有些介绍,摘录并翻译了一些,希望能对象我一样的初学者有帮助。
同时,我会在学习过程中将所学到的知识随时更新在此,有不恰当之处,也热烈欢迎大家批评指正!
一)四轴飞行器介绍
1.1. 这里是从维基百科上摘录的一段知识:
/*================================================================================================================================*/
/*================================================================================================================================*/
A quadrotor, also called a quadrotor helicopter or quadrocopter, is an aircraft that is lifted and propelled by four rotors. Quadrotors are classified as rotorcraft, as opposed to fixed-wing aircraft, because their lift is derived from four rotors. They can also be classified as helicopters, though unlike standard helicopters, quadrotors use fixed-pitch blades, whose rotor pitch does not vary as the blades rotate. Control of vehicle motion can be achieved by varying the relative speed of each rotor to change the thrust and torque produced by each.
quadrotor【四轴飞行器】,也称为quadrotor helicopter 或者 quadrocopter,是一个由四个转动体提升和推进的航空器。相对于固定翼航空器,四轴飞行器分类为旋翼机,原因是它们的提升源于四个转动体。它们也被分类为直升机,虽然并不像标准的直升机,四轴飞行器使用定螺距刀片【译者注:指桨叶】,当刀片旋转的时候,它的螺距并不变化。其运动控制可以通过改变每一个旋转体的相对速度来改变由此产生的推力和转矩来完成。

(原文件名:300px-De_Bothezat_Quadrotor_1923.jpg)
There are two generations of quadrotor designs. The first generation[when?] quadrotors were designed to carry one or more passengers. These vehicles were among the first successful heavier-than-air vertical take off and landing (VTOL) vehicles.[1] However, early prototypes suffered from poor performance,[1] and latter prototypes required too much pilot work load, due to poor stability augmentation.[2]
一共有两代四轴飞行器设计。第一代[什么时候?]四轴飞行器设计用于搭乘一到两个乘客。这些交通工具是最先成功的比空气重且垂直起降(VTOL)的交通工具之一。早期的原型机由于性能差而损坏。由于稳定性增加的并不多,稍后的原型机需要太多的驾驶员劳动负荷。
The more recent generation of quadrotors are commonly designed to be unmanned aerial vehicles (UAVs). These vehicles use an electronic control system and electronic sensors to stabilize the aircraft. With their small size and agile maneuverability, these quadrotors can be flown indoors as well as outdoors.[3]
更近一代的四轴飞行器一般设计作为无人航空器(UAVs)。这些飞行器使用一个电子控制系统和电子传感器用以稳定自身。得益于其小尺寸、灵活性以及机动性,它们能够不仅能室外,同样也能在室内飞行。
/*================================================================================================================================*/
/*================================================================================================================================*/
1.2. 这里从Mikrokopter上摘录了一段关于飞行原理的:
/*================================================================================================================================*/
/*================================================================================================================================*/
Some theory
一些理论
A frequently asked question is: how can a quadrocopter fly at all? Actually, it is quite simple...
一个常常提到的问题是:四轴飞行器究竟是怎么飞行的?事实上,这非常简单。。。
There are two different propellor-rotations. The front and back propellor turn clockwise, while the left and right propellors spin counter-clockwise. To hover, all propellors rotate at the same speed. When doing so, the forces between the clockwise props on one hand, and the counter-clockwise props on the other hand, are balanced out. This makes the quadrocopter hang steady in the air.
得有两种不同的旋转推进器(螺旋桨)。前后两个推进器顺时针旋转,而左右两个则逆时针旋转。想要盘旋,所有的推进器以相同的速度旋转即可。此时,顺时针旋转和逆时针旋转的螺旋桨产生的扭力刚好平衡。这个平衡使得四轴飞行器在空中平稳悬停。
To be able to fly in one direction, the quadrocopter will be brought out of balance. The speed of the propellor that opposes the desired direction is increased. This makes the quadrocopter tip over in a certain direction. Example: to fly forward, the back-propellor has to turn faster. This is called "pitch" or "nick". In this MK community "nick" is the preferred name for the forward/backward-movement. Left and right movements are called "rolls".
想要使飞行器朝着某个方向飞行,必须打破平衡。相对于想要飞行方向的那个推进器的速度得增加。这样使得飞行器向飞行方向倾斜。例如:想要往前飞,后面的推进器必须转得更快。这称为“pitch”或者“nick”【译者注:这个就是遥控器上的GAS,NICK,ROLL,GIER,分别指油门,前/后,左/右,偏航四个通道】。“nick”在MK社区是前/后运动的首选名称。左右运动称为“rolls”。
The opposite (vertical) axe is called "yaw", but in German and Dutch it is referred to as "gieren". To be able to yaw you need a force to turn around. This force is created by changing the speeds between the forward/backward props and the left/right props. Example: to yaw clockwise, the forward/backward propellors will turn faster and the left/right propellors will slow down a little. This makes the quadrocopter turn clockwise, while maintaining the same height.
对应前/后有一个轴向(竖向)称为“yaw”,但是在德国和荷兰,人们更愿意称为“gieren”。你得需要一个转向力才能偏航【译者注:这里yaw此感觉应该理解成“原地旋转”,不知道是否正确,请知道的tx给予回答,谢谢!】。分别改变前/后和左/右推进器能产生这样的力(译者注:前/后同速,左/右同速,两对之间不同速)。例如:想要往顺时针方向偏航,前/后推进器要转的更快,而左/右推进器要稍微慢下来一些。这样使得四轴飞行器在高度保持高度的情况下顺时针旋转。
For a stable flight, you need a controller. The main task of such a controller is to make sure that the Mikrokopter remains steady in the air. It uses data from several sensors and calculates the speed for each individual propellor and it also compensates for external disturbances like wind. The controller is programmed with (open-source) software that holds all logic to keep the Mikrokopter balanced.
你得需要一个控制器才能飞的平稳。这个控制器的主要任务是保证Mikrokopter在空中保持平稳。该控制器使用由一些传感器采集的数据,计算每一个推进器的速度,补偿风等外部干扰。控制器由(开源)软件编程,该软件控制了所有保持Mikrokopter平衡的逻辑。
/*================================================================================================================================*/
/*================================================================================================================================*/
1.3. 昨天全文看了莫站长提供的一片论文《四桨碟形飞行器飞行控制系统研究》(http://www.ourdev.cn/bbs/bbs_content.jsp?bbs_sn=991280&bbs_page_no=1&bbs_id=1025),里头也简单涉及一些知识。得到最重要的收获:
1) 加速度计是用于测量倾角的,至于加速度与倾角之间存在什么联系还有待进一步学习
2) 陀螺仪用于增加姿态的稳定性
二)相关知识介绍
2.1 PPM
PPM,Pulse Position Modulation,脉冲位置调制,属于脉冲模拟调制。
脉冲位置调制信号的幅值和脉冲宽度均恒定不变,脉冲的位置相对于载波脉冲序列信号的位置产生一个Δτ的延时。说的通俗一点就是把信号的幅值用相对载波信号的延时来线性表示。
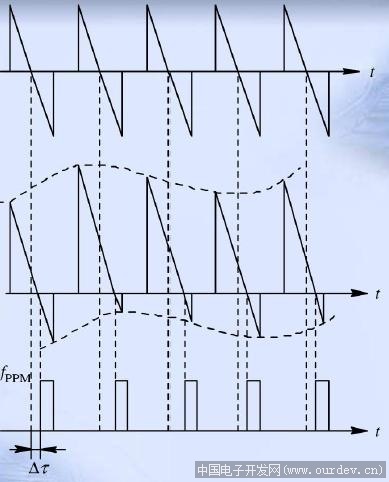
PPM波形生成 (原文件名:PPM波形生成.JPG) |
阿莫论坛20周年了!感谢大家的支持与爱护!!
知道什么是神吗?其实神本来也是人,只不过神做了人做不到的事情 所以才成了神。 (头文字D, 杜汶泽)
|


 发表于 2010-11-26 10:46:50
发表于 2010-11-26 10:46:50
 楼主
楼主