|
|
 发表于 2010-10-22 15:26:01
|
显示全部楼层
发表于 2010-10-22 15:26:01
|
显示全部楼层
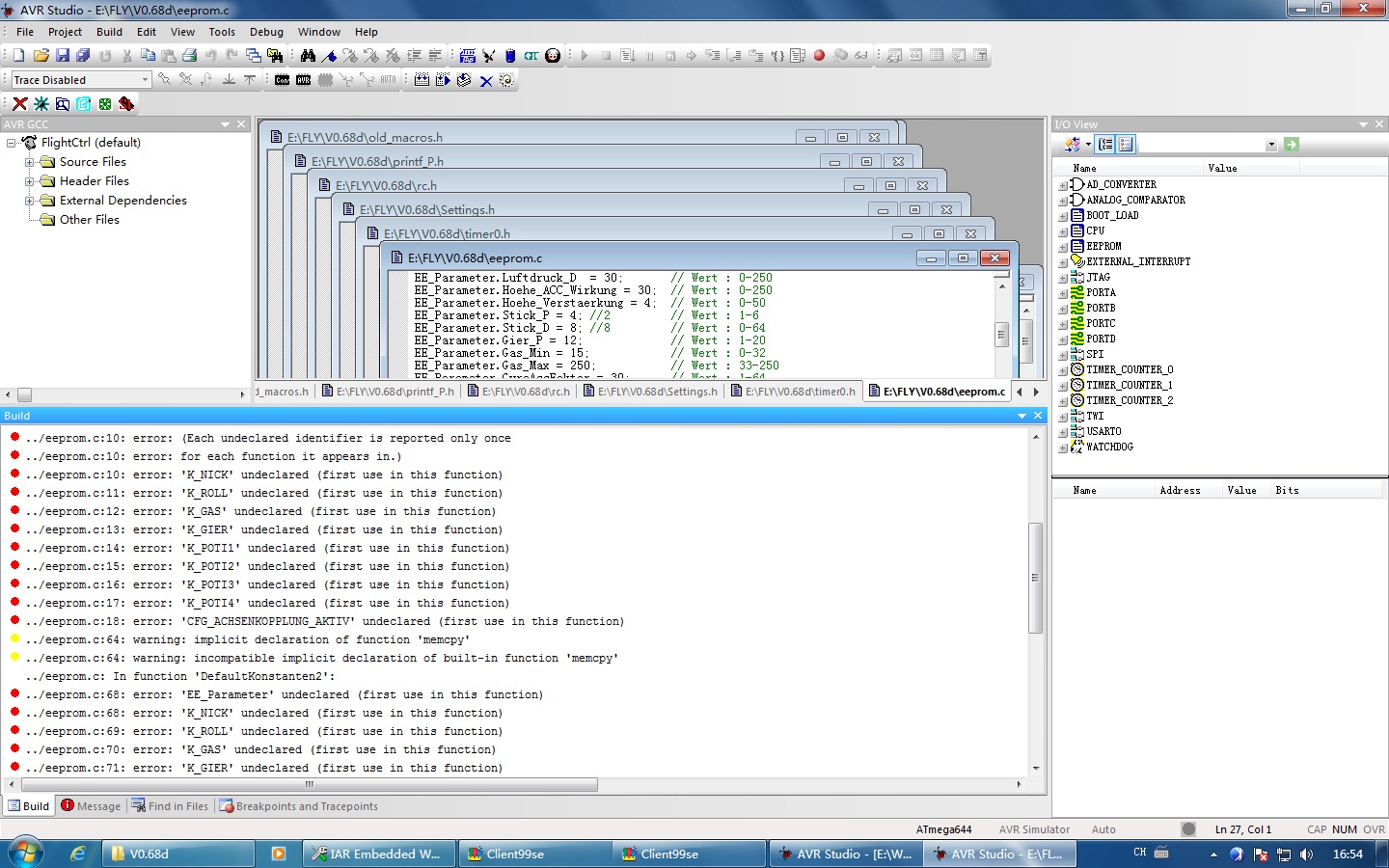
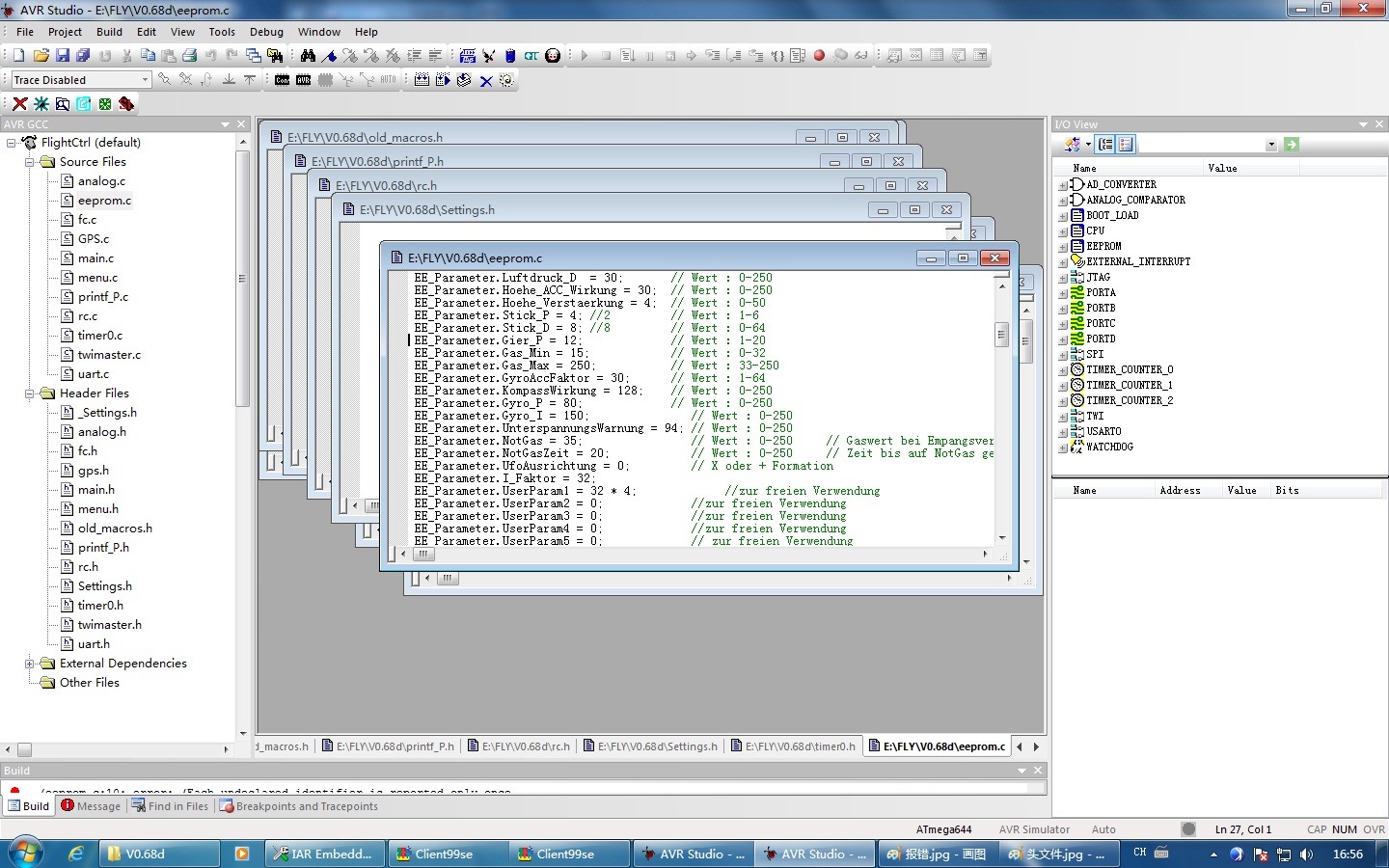
还没有编译代码,看代码是V0.71h版本。对您的问题不熟悉,随便说说。
看下面结构,是有这个变量的呀。是否是有什么宏定义没有打开呀
struct mk_param_struct
{
unsigned char Kanalbelegung[8]; // GAS[0], GIER[1],NICK[2], ROLL[3], POTI1, POTI2, POTI3
unsigned char GlobalConfig; // 0x01=H鰄enregler aktiv,0x02=Kompass aktiv, 0x04=GPS aktiv, 0x08=Heading Hold aktiv
unsigned char Hoehe_MinGas; // Wert : 0-100
unsigned char Luftdruck_D; // Wert : 0-250
unsigned char MaxHoehe; // Wert : 0-32
unsigned char Hoehe_P; // Wert : 0-32
unsigned char Hoehe_Verstaerkung; // Wert : 0-50
unsigned char Hoehe_ACC_Wirkung; // Wert : 0-250
unsigned char Stick_P; // Wert : 1-6
unsigned char Stick_D; // Wert : 0-64
unsigned char Gier_P; // Wert : 1-20
unsigned char Gas_Min; // Wert : 0-32
unsigned char Gas_Max; // Wert : 33-250
unsigned char GyroAccFaktor; // Wert : 1-64
unsigned char KompassWirkung; // Wert : 0-32
unsigned char Gyro_P; // Wert : 10-250
unsigned char Gyro_I; // Wert : 0-250
unsigned char UnterspannungsWarnung; // Wert : 0-250
unsigned char NotGas; // Wert : 0-250 //Gaswert bei Emp鋘gsverlust
unsigned char NotGasZeit; // Wert : 0-250 // Zeitbis auf NotGas geschaltet wird, wg. Rx-Problemen
unsigned char UfoAusrichtung; // X oder + Formation
unsigned char I_Faktor; // Wert : 0-250
unsigned char UserParam1; // Wert : 0-250
unsigned char UserParam2; // Wert : 0-250
unsigned char UserParam3; // Wert : 0-250
unsigned char UserParam4; // Wert : 0-250
unsigned char ServoNickControl; // Wert : 0-250 // Stellung des Servos
unsigned char ServoNickComp; // Wert : 0-250 // Einfluss Gyro/Servo
unsigned char ServoNickMin; // Wert : 0-250 // Anschlag
unsigned char ServoNickMax; // Wert : 0-250 // Anschlag
unsigned char ServoNickRefresh; //
unsigned char LoopGasLimit; // Wert: 0-250 max. Gas w鋒rend Looping
unsigned char LoopThreshold; // Wert: 0-250 Schwelle f黵 Stickausschlag
unsigned char LoopHysterese; // Wert: 0-250 Hysterese f黵 Stickausschlag
unsigned char AchsKopplung1; // Wert: 0-250 Faktor, mit dem Gier die Achsen Roll und Nick koppelt (NickRollMitkopplung)
unsigned char AchsGegenKopplung1; // Wert: 0-250 Faktor, mit dem Gier die Achsen Roll und Nick Gegenkoppelt (NickRollGegenkopplung)
unsigned char WinkelUmschlagNick; // Wert: 0-250 180?Punkt
unsigned char WinkelUmschlagRoll; // Wert: 0-250 180?Punkt
unsigned char GyroAccAbgleich; // 1/k (Koppel_ACC_Wirkung)
unsigned char Driftkomp;
unsigned char DynamicStability;
unsigned char UserParam5; // Wert : 0-250
unsigned char UserParam6; // Wert : 0-250
unsigned char UserParam7; // Wert : 0-250
unsigned char UserParam8; // Wert : 0-250
//---Output ---------------------------------------------
unsigned char J16Bitmask; // for the J16 Output
unsigned char J16Timing; // for the J16 Output
unsigned char J17Bitmask; // for the J17 Output
unsigned char J17Timing; // for the J17 Output
//---NaviCtrl---------------------------------------------
unsigned char NaviGpsModeControl; // Parameters for the Naviboard
unsigned char NaviGpsGain;
unsigned char NaviGpsP;
unsigned char NaviGpsI;
unsigned char NaviGpsD;
unsigned char NaviGpsACC;
unsigned char NaviGpsMinSat;
unsigned char NaviStickThreshold;
unsigned char NaviWindCorrection;
unsigned char NaviSpeedCompensation;
unsigned char NaviOperatingRadius;
unsigned char NaviAngleLimitation;
//---Ext.Ctrl---------------------------------------------
unsigned char ExternalControl; // for serial Control
//------------------------------------------------
unsigned char BitConfig; // (war Loop-Cfg) Bitcodiert: 0x01=oben, 0x02=unten, 0x04=links, 0x08=rechts / wird getrennt behandelt
unsigned char ServoNickCompInvert; // Wert : 0-250 0 oder 1 // WICHTIG!!! am Ende lassen
unsigned char Reserved[4];
char Name[12];
}; |
|


 楼主
楼主