|
|
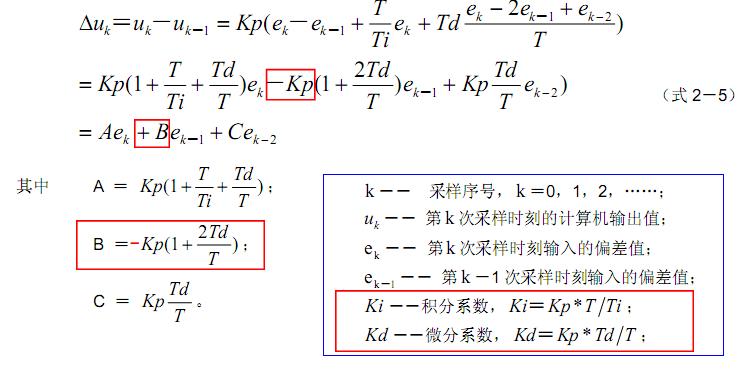
增量式输出值为△U(k)
位置式输出值为U(k)=U(k-1)+△U(k)
△U(k)=U(k)-U(k-1)
=A*E(k)+B*E(k-1)+C*E(k-2)
=Kp*(E(k)-E(k-1))+Ki*E(k)+Kp(E(k)+E(k-2)-2*E(k-1))
★其中:
Kp 比例系数
Ki 积分系数 Ki=Kp*T/Ti
Kd 为分系数 Kd=Kp*Td/T
k 采样序号,k=0,1,2,……;
E(k) 第k次PID运算(采样并处理)时输入的偏差值,即Set-Now
E(k-1)前一次
U(k) 第k次PID运算时的输出值
T 采样周期,即一次PID控制的周期
Ti 积分时间,与T运算转化成积分系数,即在输出中占的比重
Td 微分时间,与T运算转化成微分系数,即在输出中占的比重
A= Kp*(1+Td/T+T/Ti) //这三个系数已经不能算是比例积分微分系数中了任意一个了,只是方便整定
B=-Kp*(1+2Td/T)
C= Kp*Td/T
★临界条件下:将调节器置于纯比例作用下,从小到大逐渐改变调节器的比例系数,得到等幅振荡的过渡过
程。此时的比例系数称为临界比例系数 ,相邻两个波峰间的时间间隔,称为临界振荡周期Tu。
满足:T = 0.1Tu
Ti= 0.5Tu
Td= 0.125Tu
即Kp=Ku,Ki=0.2Ku,Kd=0.25Ku
★临界比例度法步骤:
1、将调节器的积分时间置于最大(Ti =∞),微分时间置零(Td =0),比例系数Kp适当,平衡操作一段时间,把
系统投入自动运行。
2、将比例系数Kp逐渐增大,得到等幅振荡过程,记下临界比例系数Kp和临界振荡周期Tu值。
3、根据Kp和Tu值,采用经验公式,计算出调节器各个参数,即Kp。Ti和Td 的值。
按照先P再I最后D的操作程序将调节器整定参数调到计算值上。若还不够满意,可再作进一步调整。
★临界比例度法整定注意事项:
有的过程控制系统,临界比例系数很大,使系统接近两式控制,调节阀不是全关就是全开,对工业生产不利。
有的过程控制系统,当调节器比例系数 调到最大刻度值时,系统仍不产生等幅振荡,对此,就把最大刻度
的比例度作为临界比例度 进行调节器参数整定。
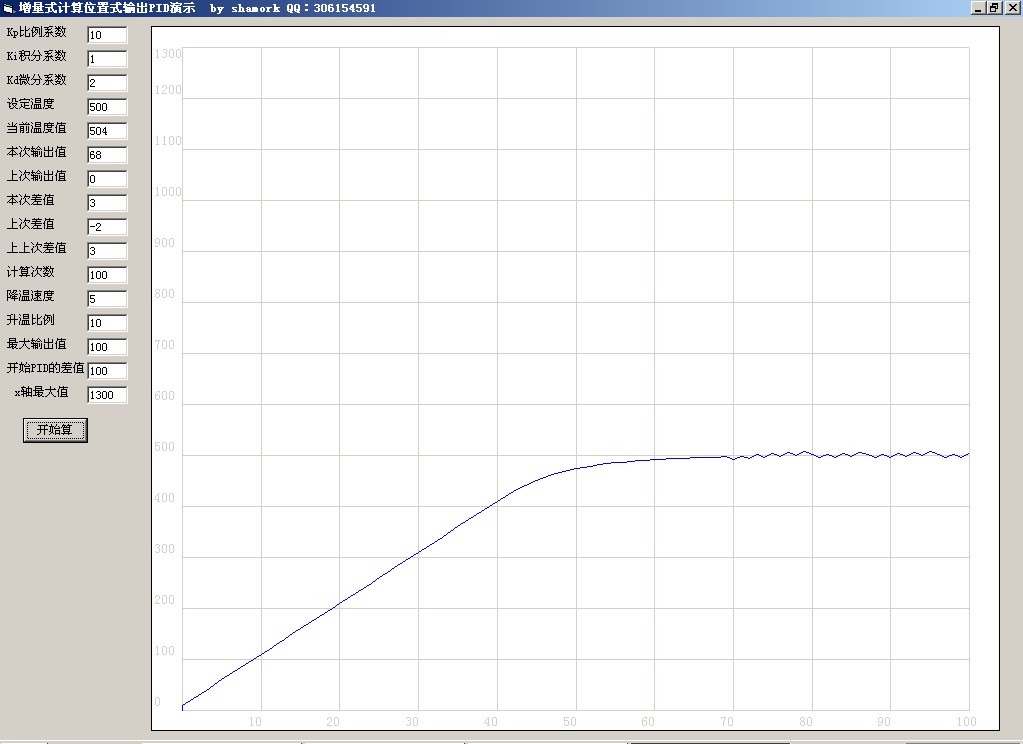
本模拟程序输出U(k),使用增量式计算公式,用U(k)=U(k-1)+△U(k)得出位置式的输出
可以自己设定参数
需要说明的几点:
0.本程序原创,要转载请注明来自http://www.ourdev.cn/bbs/edit_articles_interface.jsp?bbs_sn=4122504&parent_no=4122504&bbs_page_no=1&bbs_id=9999 。要改动务必保留本人网名和联系方式。
1.所有设定值均为interger,整数,所以设定时注意不要超界
2.升温比例和降温比例设定为整数,在0到最大输出值之间
例如最大输出值为100,两个比例均设定为10,则每次符合条件的计算中当前温度会+/-10,如果最大输出值为200,则+/-20
3.差值=设定值-当前值,本次差值在下次计算时变成上次差值,依次类推
4.x轴坐标为计算次数,y轴坐标为温度。最大值均可设定,最小值均为0
下图是默认设置的计算图
<font color=green>(原文件名:TM截图未命名.jpg)
这是编译好的exe程序
点击此处下载 ourdev_564464RS0KCZ.rar(文件大小:7K) (原文件名:PID模拟.rar)
这是完整的工程
点击此处下载 ourdev_564465UKAMHD.rar(文件大小:11K) (原文件名:PID计算.rar)
说实话我真不怎么会VB,写这玩意儿都是边百度边写。
上传一片文章,PID的。解释的非常清楚,我在有些的地方做了标注。最重要的就是u(k)=A*E(k)+B*E(k-1)+C*E(k-2)中B的系数。一定注意下。实际上真正的式子在上面位置式中。
点击此处下载 ourdev_564467UUDUBU.pdf(文件大小:688K) (原文件名:PID超详细论文.pdf)
</font> |
阿莫论坛20周年了!感谢大家的支持与爱护!!
知道什么是神吗?其实神本来也是人,只不过神做了人做不到的事情 所以才成了神。 (头文字D, 杜汶泽)
|


 发表于 2010-6-28 14:28:26
发表于 2010-6-28 14:28:26
 楼主
楼主