|
|

楼主 |
发表于 2009-3-9 21:26:01
|
显示全部楼层
恩那,我把idata unchar period=1500000 改为idata long period=1500000 了
#include <c8051F310.h> /*取8u定时*/
int i,j;
typedef unsigned char unchar;
typedef unsigned int unint;
typedef unsigned long unlong;
#define INIT 0x29 //专用初始化命令字0010 1001
#define OSCon 0x01 //开振荡器:0000 0001
#define LCMon 0x03 //开显示器:0000 0011
sbit LCM_CS=P1^2; //端口定义
sbit LCM_WR=P1^3;
sbit LCM_DATA=P1^4;
unchar DisData[8]={0x06,0x06,0x07,0x0d,0x07,0x0d,0x07,0x0d};//从左到右
idata unlong time;
idata unlong period=10; //周期 40us
idata unlong high=2; //脉宽 2*8=16us
sbit P1_0=P1^0;
void Port_Init (void); // Port initialization routine函数声明
void Timer0_Init (void); // Timer0 initialization routine
void config(){
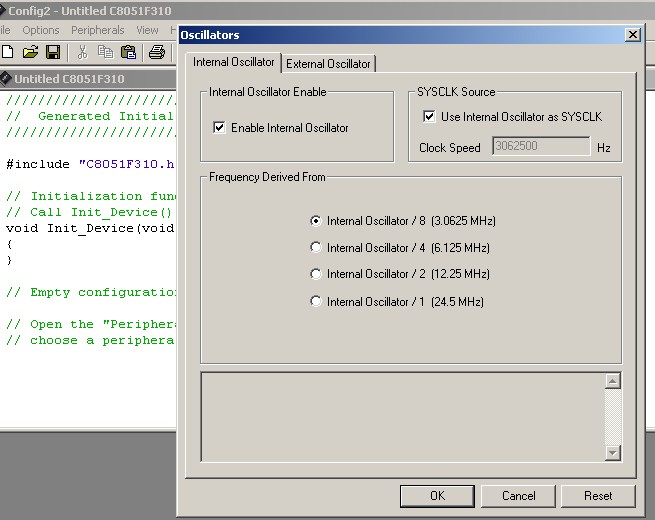
CLKSEL=0x00; //系统时钟配置,采用内部晶振,系统时钟频率10MHZ
OSCICL=0x45;
OSCICN=0xC2; //为内部晶振2分频
}
void L_Write(void);
void L_Disp(unchar D);
void delay1us(unint t)
{
unint i;
unint j;
for(i=0;i<t;i++){
for(j=0;j<300;j++);}
}
void main(void)
{
config();
PCA0MD &= ~0x40; // Disable Watchdog timer
Timer0_Init (); // Initialize the Timer0
Port_Init (); // Init Ports// Clear watchdog timer enable(以上两行后加)
EA=1; // Enable global interrupts
L_Disp(INIT);//写初始化命令字
L_Disp(0x18);//定义RC振荡方式:选内部振荡器
L_Disp(OSCon);//开振荡器
L_Disp(LCMon);//开显示器
L_Write();//连续写数据,地址
do{} while(1);
//while(1);
}
void L_Write(void)//写数据,地址
{
LCM_CS=0;
LCM_WR=0;
delay1us(10);
LCM_DATA=1; //发101表示数据
delay1us(10);
LCM_WR=1; //产生写脉冲
delay1us(10);
LCM_WR=0; //写脉冲结束
delay1us(10);
LCM_DATA=0;
delay1us(10);
LCM_WR=1; //产生写脉冲
delay1us(10);
LCM_WR=0; //写脉冲结束
delay1us(10);
LCM_DATA=1;
delay1us(10);
LCM_WR=1; //产生写脉冲
delay1us(10);
for(i=0;i<6;i++) //6位地址00000
{
LCM_WR=0;
delay1us(10);
LCM_DATA=0;
delay1us(10);
LCM_WR=1;
delay1us(10);
}
for(i=0;i<8;i++) //数据32位
{
for(j=0;j<4;j++)
{
LCM_WR=0;
delay1us(1);
if(DisData&0x01)
{
LCM_DATA=1;
}
else
{
LCM_DATA=0;
}
DisData>>=1;
delay1us(1);
LCM_WR=1;
delay1us(1);
}
}
LCM_CS=1;
}
// 对显示器的命令也很重要,命令格式是:
//100 C7 C6 C5 C4 C3 C2 C1 C0 0 共12位
// 具体命令方法如下:
void L_Disp(unchar D)
{
int i;
LCM_CS=0;
delay1us(1);
LCM_WR=0; //发100,表示命令
delay1us(1);
LCM_DATA=1;
delay1us(1);
LCM_WR=1; //产生写脉冲
delay1us(1);
LCM_WR=0; //写脉冲结束
delay1us(1);
LCM_DATA=0; //发送一位数据
delay1us(1);
LCM_WR=1; //产生写脉冲
delay1us(1);
LCM_WR=0; //写脉冲结束
delay1us(1);
LCM_DATA=0;
delay1us(1);
LCM_WR=1; //产生写脉冲
delay1us(1);
//--------发送命令----------------
for(i=0;i<8;i++)
{
LCM_WR=0;
delay1us(1);
if(D & 0x80) //高位在先
{
LCM_DATA=1;
}
else
{
LCM_DATA=0; //发送一位数据
}
D<<=1; //数据左移一位
delay1us(1);
LCM_WR=1;
delay1us(1);
}
LCM_WR=0; //写脉冲结束
delay1us(1);
LCM_DATA=0; //以0结束
delay1us(1);
LCM_WR=1; //产生写脉冲
delay1us(1);
LCM_CS=1;
delay1us(1);
}
void Timer0_Init(void)
{
TH0=(65536-25)/256;
TL0=(65536-25)%256;
TMOD=0x01;
CKCON=0x01; //系统时钟4分频
ET0=1; // Timer0 interrupt enabled
TCON = 0x10; // Timer0 ON
}
void Port_Init (void)
{
XBR0=0x00;
XBR1 = 0x40; // Enable crossbar
P1MDOUT = 0x1D; // Set push-pull
}
void Timer0_ISR (void) interrupt 1 //timer0() interrupt 1 using 1
{
TH0=(65536-25)/256;//TH0=(65536-10)/256;10是4,5是2us
TL0=(65536-25)%256;//TL0=(65536-10)%256;
if(++time==high)
P1_0=0;
else if(time==period)
{
time=0;
P1_0=1;}
}
改成这样了,出来之后脉宽为50us,周期250us |
|


 发表于 2009-3-9 16:43:30
发表于 2009-3-9 16:43:30