|
|
新版的四轴飞控板制作完成,已经测试(图) 蚂蚁出品,必属样品。:)
说明:这是仿制品,所以不要问我要程序啊什么的,论坛已经很多了。为方便做我们自己的AVR32四轴,只希望喜欢的朋友能尽快用样机上手熟悉起来,毕竟搞电子不一定会玩航模,熟悉才是首要的。开源本身是为了推广,所以与应用没啥冲突,通过实际使用,可以发现很多以前学不到的东西。其实我现在已经对三个轴的飞行器感兴趣了,正在准备试试看。废话不说了,上图和文件。
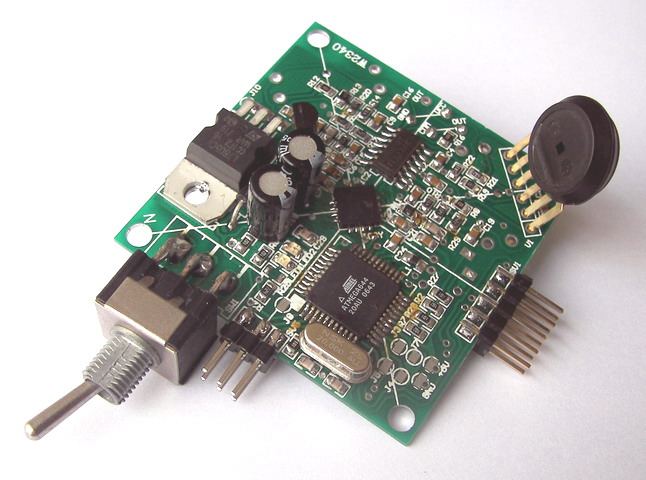
装配完成的板子(已测试) (原文件名:无刷飞控新版.JPG)
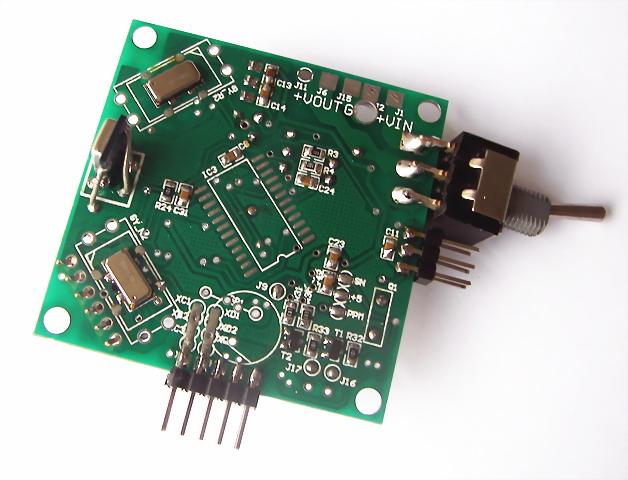
反面图。 (原文件名:无刷飞控新版B.JPG)
新版原理图与清单ourdev_434330.pdf(文件大小:1.00M) (原文件名:四轴原理图(新无刷)2.pdf)
1.本飞控可以实现四轴的自主飞行控制,需要至少6个比例通道的遥控器,目前兼容天地飞、futaba等PPM信号格式的遥控器,JR遥控器由于信号反相暂时不能直接支持,可外接转换板解决这个问题。
2.传感器:角速度传感器和加速度传感器是必需的;高度气压传感器可选,如果不装将没有高度自动保持功能。
板子封装支持情况:
角速度:ENC-03JA、ENC-03MA、ENC-03MB、ENC-03RC
加速度传感器:LIS3L02AS4、MMA7260QT
气压传感器:MPX4115A、MPX4115AP
3.飞控适用电压为7.2-14.8V。
顺便和阿莫说一下,如果有需要,我可以免费提供两套空板给论坛用(一块飞控板+四块电调板),材料要自备哦(我是穷人,嘿嘿)。
本贴被 wwwer 编辑过,最后修改时间:2008-09-28,15:57:15. |
阿莫论坛20周年了!感谢大家的支持与爱护!!
知道什么是神吗?其实神本来也是人,只不过神做了人做不到的事情 所以才成了神。 (头文字D, 杜汶泽)
|


 发表于 2008-9-28 15:52:17
发表于 2008-9-28 15:52:17
 楼主
楼主