|
|
 发表于 2008-6-12 22:15:18
|
显示全部楼层
发表于 2008-6-12 22:15:18
|
显示全部楼层
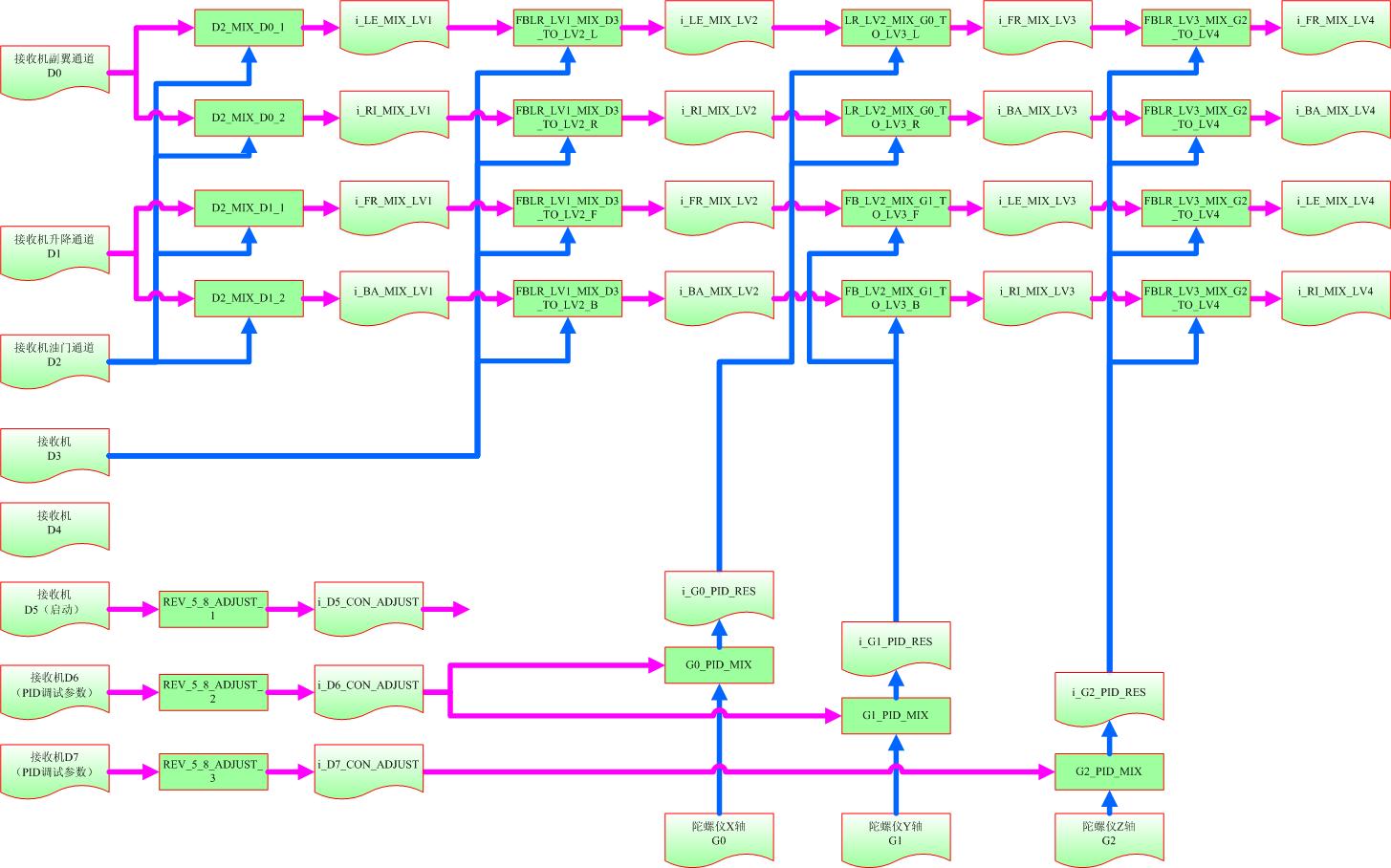
我到是特别想了解下GY401的算法,1轴陀螺,但是可以达到锁尾的效果
【24楼】 kennyzhao 说的很好,减少采样时间就可以减少误差,但是减少并不是避免,误差是无可避免的并且会不断累计,这样误差还是可能造成4轴都已经倾斜40度或者更多以后它自己还以为自己是水平的
要是可以想办法达到401的水平,起飞前定一个中立位置,起飞后就三轴锁定了,就可以达到平衡的效果
积分算角度累积量肯定是有误差的,但是要是配合3轴加速度我想还是有办法的
设想即使是横测偏转30度后角度传感器默认水平,此时4轴出力平衡,若没有风的影响下,4桨形成的桨平面如同机翼一般,4轴将顺倾斜方向滑下,此时加速度应该顺Z轴向下与Y轴方向,且夹角可算,此夹角和实际倾角方向一样而大小不同,但是已经可以告诉4轴,机身并不如陀螺想象中那么稳定了,已经倾斜且方向已知.
如果是我,变选择各打50大板,一个说平的,一个说倾斜了,那么就按照3轴加速度计算出来的角度的一半来定义4角倾斜的角度,再输出到动力上,进行一半角度的调整,那么实际上经过调整以后4轴依然存在倾斜,但是角度已经变小,且再进入以上循环后角度还会继续减小,这样,4轴在不进行运动操作且无风的状况下就可以做到实际倾角无限接近与传感器测量倾角.
再者,我门设定的是30度倾角后才开始修正,要是一出现倾角变化就开始修正,那么4轴应该处于一个相对稳定的状态.
如果并非在飞行过程中,电脑测试时,完全可以用3轴加速度代替3轴陀螺来修正角度偏差,但是在飞行过程中则不可取,我觉得可以采取各打50大板的方法来取角度
以上仅是自己的一点想法,漏洞百出,就是随便说下自己的想法,希望大家指教! |
|


 楼主
楼主