clogord 发表于 2012-3-26 14:37
有人搞了么 我想看实际的结果


clogord 发表于 2012-3-26 14:37
有人搞了么 我想看实际的结果
vp110 发表于 2012-3-26 15:22
不懂,
当个看客也不容易啊。
视频下载不了,楼主能否给个在线的链接?
czjiuyu 发表于 2012-3-26 19:09
这位兄弟,能否告知电话或打我电话18961496183 陈立,我们公司正在研发一套奶粉铁盖的自动输送系统,国外有 ...
所向披靡 发表于 2012-4-30 22:54
请问楼主,我的358 3脚和5脚调至1.65v,2脚和6脚接3503输出(大约2.54v),为什么1脚和7脚才零点几伏?谢 ...
甘子贤 发表于 2012-5-9 16:41
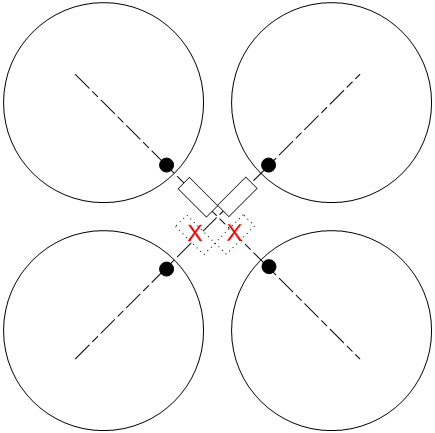
弱弱的问下 为什么线圈下面还要加磁环呢 用4个线圈吸和斥不就能保持平衡了吗 ...

zjz6106 发表于 2012-9-18 13:03
我现在在做下推式磁悬浮。有两个问题:1.霍尔元件放在线圈的中心位置(高度),但是仍然会受线圈磁场影响; ...
SHIYOULAN 发表于 2012-9-23 23:57
你好啊!! 请问四个线圈一定最好要在环形磁铁中央吗?不在的话会不会产生不好的影响? ...
xiaob5809469 发表于 2012-7-29 12:06
我现在连理论家都不是,单纯小白一个,需要学的还有好多好多。请问楼主,我应该从哪来学起?我是大学生,专 ...
甘子贤 发表于 2012-5-22 19:04
还想请教下老师, 线圈下面的加的磁环如果换成一个个圆形磁铁,那么圆形磁铁的N, S极 要怎么放置呢? 是所 ...
gzhuli 发表于 2012-9-24 00:30
不一定在中央,不在中央的话各个方向的控制力不同,需要不同的PID参数。 ...
SHIYOULAN 发表于 2012-9-24 11:43
好的。。我做的东西,感觉悬浮物在环形磁铁的正上方的活动范围太小了!! 很容易被永磁铁拉出去!是不是 ...
gzhuli 发表于 2012-9-24 11:48
范围是很小,5mm左右吧。
gzhuli 发表于 2012-9-24 00:27
1.多少是会受线圈影响,因为不可能刚好放在正中心,误差总是有的,这可以不管,PID能应付。
2.加铁心是必 ...
zjz6106 发表于 2012-10-1 00:24
加铁心后,磁铁不就被铁心吸下去了吗?
gzhuli 发表于 2012-10-1 11:28
铁心在环形磁铁的中心,那里的磁场比上面的磁铁强。
小不点儿 发表于 2012-10-5 10:47
请问源代码中的这段什么意思?
if (xPWM >= 0)
{
gzhuli 发表于 2012-10-5 11:28
代码下面不是有解释么?
小不点儿 发表于 2012-10-5 12:03
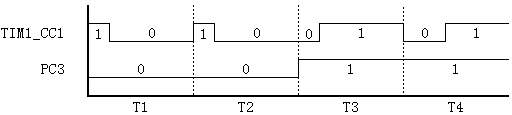
初学者,正在用MSP430做,在学习STM8的源代码,但是进展很慢,希望您能给出AD以及TIMI(也就是您公 ...
| 欢迎光临 amobbs.com 阿莫电子技术论坛 (https://www.amobbs.com/) | Powered by Discuz! X3.4 |
