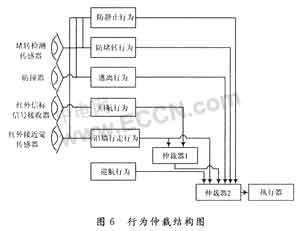
行为分为2种类型:伺服行为和弹道式行为。伺服行为采用反馈控制环作为他的控制单元。弹道式行为,自始至终都会按照预先没定好的模式运行。弹道式行为的整体规划过程同实现程序代码密切相关,执行过程中的环境变化或者行为初始化过程中的任何微小错误(如噪声假信号所导致的误操作),都会给机器人带来麻烦,导致彻底失效。伺服行为具有良好的抗噪声能力,对工作过程中的其他微小故障也具有较强的容错性。 本文的行为采用有限状态机(Finite state Machine,FSM)使能够更方便地理解系统工作过程,从而可以容易地编写系统实现代码。
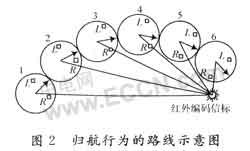
a) 超声波信标节点不断向外发射红外和超声波信号,每个节点的红外与超声波信号编码相对应,并且与其他节点的信号编码不同。
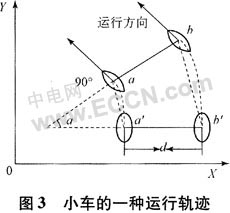
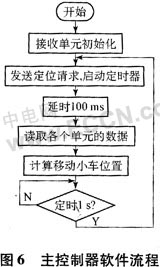
b) 普通节点每隔1 s(可以改变,但不能太长,否则小车出现拐弯时运行轨迹可能不平行)进行一次定位,主控制器通过串口向各个单元发出定位信号并启动内部定时器,延时100 ms后依次读取8个超声测距单元所测得的a、b这2点到参考点的距离信息和2个光电编码器测距单元记录的位移信息,计算出移动小车的位置和运行方向。定时器定时到1 s后重复此过程。主控制器的软件流程如图6所示。
c) 2个光电编码器测距单元初始化后立刻开始记录轮子的位移,串口收到定位信号后,将记录的位移信息存到指定位置,等待主控制器读取,并从0开始继续记录位移情况。
行为分为2种类型:伺服行为和弹道式行为。伺服行为采用反馈控制环作为他的控制单元。弹道式行为,自始至终都会按照预先没定好的模式运行。弹道式行为的整体规划过程同实现程序代码密切相关,执行过程中的环境变化或者行为初始化过程中的任何微小错误(如噪声假信号所导致的误操作),都会给机器人带来麻烦,导致彻底失效。伺服行为具有良好的抗噪声能力,对工作过程中的其他微小故障也具有较强的容错性。 本文的行为采用有限状态机(Finite state Machine,FSM)使能够更方便地理解系统工作过程,从而可以容易地编写系统实现代码。



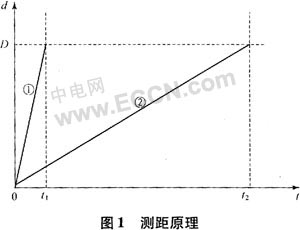 (原文件名:图1.jpg)
(原文件名:图1.jpg) 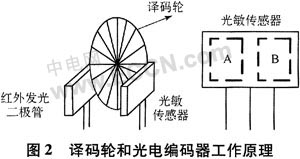 (原文件名:图2.jpg)
(原文件名:图2.jpg)